Det som ser ut som et mislykket forsøk på å slå opp et iglo-telt er kanskje NASAs neste mars-rover.
Super Ball Bot kalles den underlige roboten.
Den representerer et skritt vekk fra klassiske, stive roboter, mot såkalte "tensegrity-roboter", skriver den amerikanske romorganisasjonen på sine nettsider.
Konstruksjonen består av tynne stenger og kabler, og NASA ser nå for seg at hundrevis av slike små, solide og billige roboter kan utforske himmellegemer med krevende forhold.
Les også: Romobservatoriet Gaia skal lage 3D-kart av galaksen
Tensigrity
Tensigrity kan oversettes til norsk som spennings-integritet, og begrepet ble først brukt av oppfinneren Buckminster Fuller i 1960-åra.
Prinsippet går ut på at stengene i konstruksjonen holdes sammen i et nett av kabler som står i spenn, helt uten stive sammenkoblinger.
På grunn av den spesielle strukturen vil alle lemmene være utsatt for jevn belastning, noe som gjør strukturen ekstremt solid, tross sin lave vekt, og vaklvorne utseende.
Les også: Slik kan du bygge roboter uten koding
Sprett-landing
NASA mener en slik struktur egner seg godt for landing på planeter og måner.

De kan sendes mot planeten fra et romfartøy og dempe fallet ved å sprette på overflaten, uten fallskjermer og landingsraketter.
Kjernen i midten av strukturen, som inneholder instrumenter og maskinvare, beskyttes av tensigrity-strukturen, forteller NASA-forsker Vytas SunSpiral (det er faktisk hans virkelige navn) til nettstedet IEEE Spectrum.
Slik kan man unngå de ekstremt kompliserte, energikrevende og risikable operasjonene som må til for å lande klassiske roboter på overflaten, og sikkert spare NASA-ansatte i kontrollrommene for en god del stress.
Super Ball Bot skal så kunne endre form, for å rulle av gårde mot hva enn den skal undersøke.
VIDEOANIMASJON: Slik blir månen i 2014
Krevende
NASA ser for seg at dusinvis, kanskje hundrevis av små roboter av denne typen kan sprette og rulle rundt på overflaten.


Med redusert kostnad og risiko kan man også ha mulighet til å undersøke himmellegemer hvor man vet mindre om forholdene på overflaten, noe som gjør bruk av dyre enkeltroboter risikabelt.
Det gir mulighet for undersøkelse av svært ugjestmilde steder, som saturns måne Titan, skriver NASA.
Det å få en slik struktur til å oppføre seg som man vil er imidlertid ikke lett. Forskerne eksperimenterer nå med forskjellige typer dataprogrammer for å kunne styre den.
Blant annet tester man ut algoritmer som skal gi roboten evne til å utvikle egen adferd, og dataprogrammer inspirert av nevrovitenskap.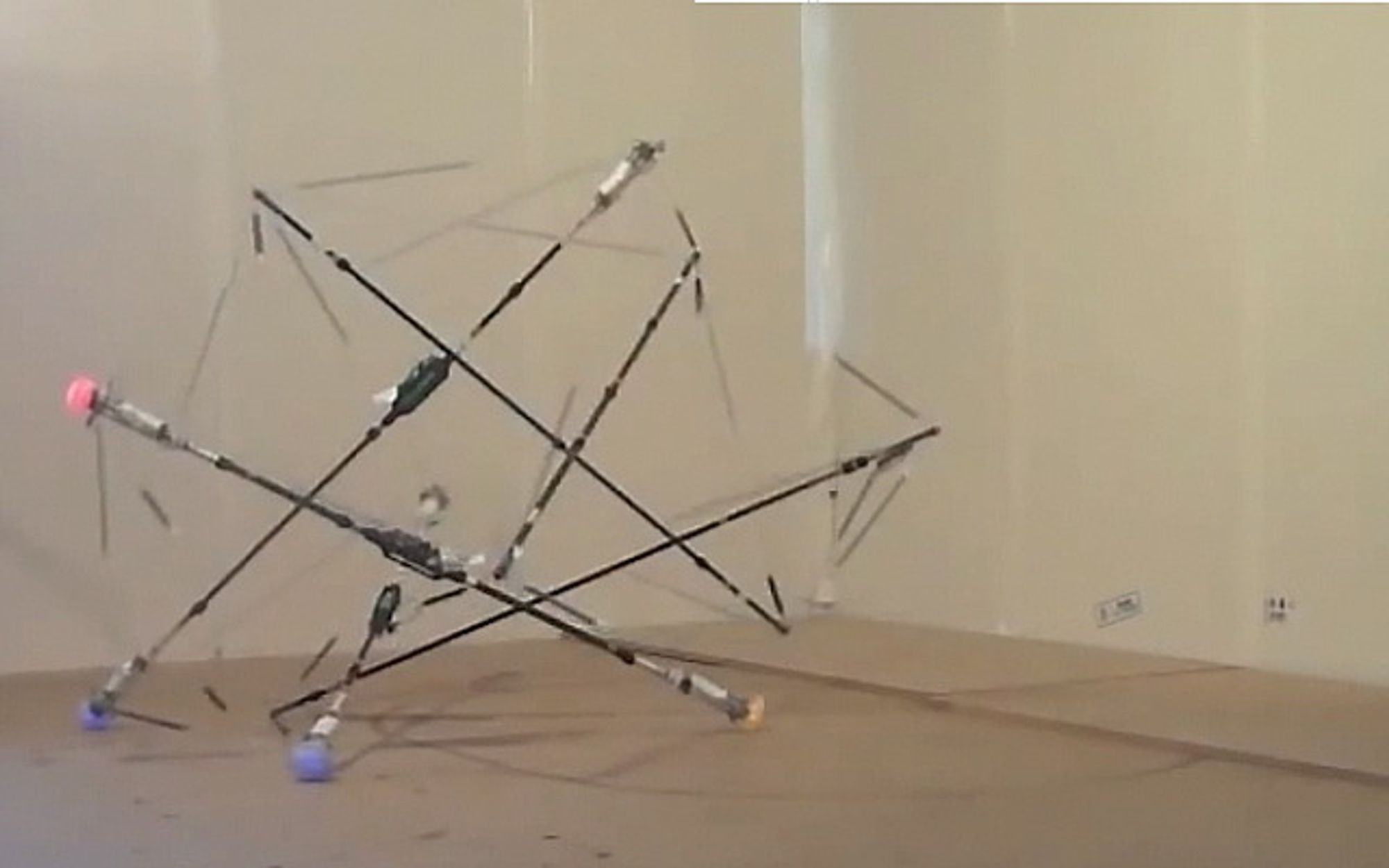
Les også:
Laser-bredbånd gir seks ganger raskere kommunikasjon