








Det er i hvert fall målet til en studentgruppe ved University of British Columbia (UBC) i Vancouver, på Canadas vestkyst.
Den norske ingeniørstudenten Kristoffer Vik Hansen ved UBC er kaptein og leder for studentgruppen som har utviklet den autonome seilbåten Ada i prosjektet UBC SailBot.
Suverene i konkurranse
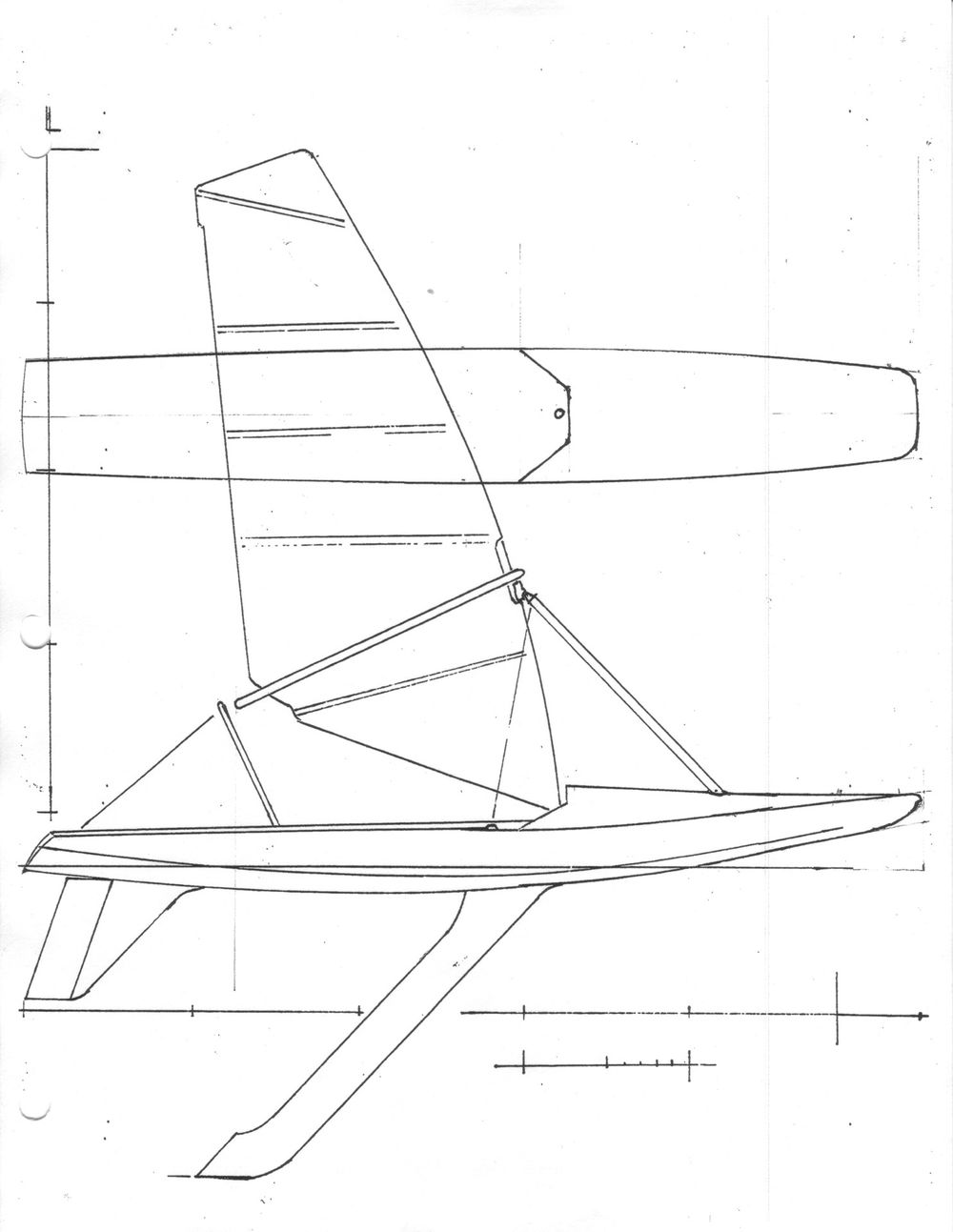
Den er på 5,5 meter og bygget i karbon. Farkosten er spekket med sensorer og elektronikk. Det meste er utviklet og tilpasset av studentene.
– Vi har vunnet International Robotic Sailing Regatta tre år på rad og fått toppscore på alle måleparametere de to siste gangene. Nå er vi klare for større utfordringer, sier Hansen på telefon fra Vancouver.
En hektisk tid ligger foran en gjeng på rundt 10 studenter. Totalt har over 60 vært involvert, men i klargjøringsfasen er de nå en mindre gruppe.
Les også: Norsk verft bygger luksusyacht som kan navigere i drivis

Vestkyst-testing
– Vi skal kjøre en rekke tester i sjøen og finjustere teknikken her utenfor vestkysten før vi i september vil forsøke oss over Atlanteren, sier Hansen. Alt avhenger imidlertid av langtidsværmeldingene.

På Vestkysten får de ikke tilnærmet så tøffe testforhold som båten vil møte i Atlanteren. Det er en utfordring, innrømmer kapteinen.
– Er prognosene for dårlige, må vi vente til neste år, sier Hansen, som strengt tatt ikke lenger er student. Han ble ferdig med sin bachelor i mekanikk og programvareutvikling i mai. Kristoffer vil likevel ikke gi opp kapteinsoppgaven før Atlanterhavskryssingen er gjennomført. Han har jobbet med dette i fem år.
Les også: Planlegger cruiseskip med «X-bow»

Oppskalert
Kristoffer Vik Hansen og hans team har stått på dag og natt i perioder for å løfte prosjektet opp i størrelse. Båtene de har vunnet International Robotic Sailing Regatta med, har væt mindre.
Seilbåten Ada skal delta i regattaen Micro Transatlant, kalt seilingens svar på å klatre Mount Everest. Regattaen starter i St. John's på Newfoundland og ender opp i Dingle, i Irland. I luftlinje er ferden på 2.900 kilometer og aldri blitt seilt uten mannskap tidligere.
Regattaen har ingen felles start, men kan påbegynnes når registrering og formelle krav er oppfylt og teamene selv er klare for å starte seilasen.
.jpg)
– Vi vil registrere oss rett før start, sier Hansen.
Les også: Søndag sjøsettes el-skuta som genererer kraft

Proff bistand
18-fotsbåten blir spekket med det nyeste av hjelpemidler, utviklet i tett samarbeid mellom studentene, UBCs professorer og industrielle partnere. Skroget og skipsteknisk design er utført av studentene, men med profesjonelle skipskonstruktører til å gå gjennom og kontrollere. Seileriggen er bygget på en windsurferrigg og optimalisert for dette fartøyet.
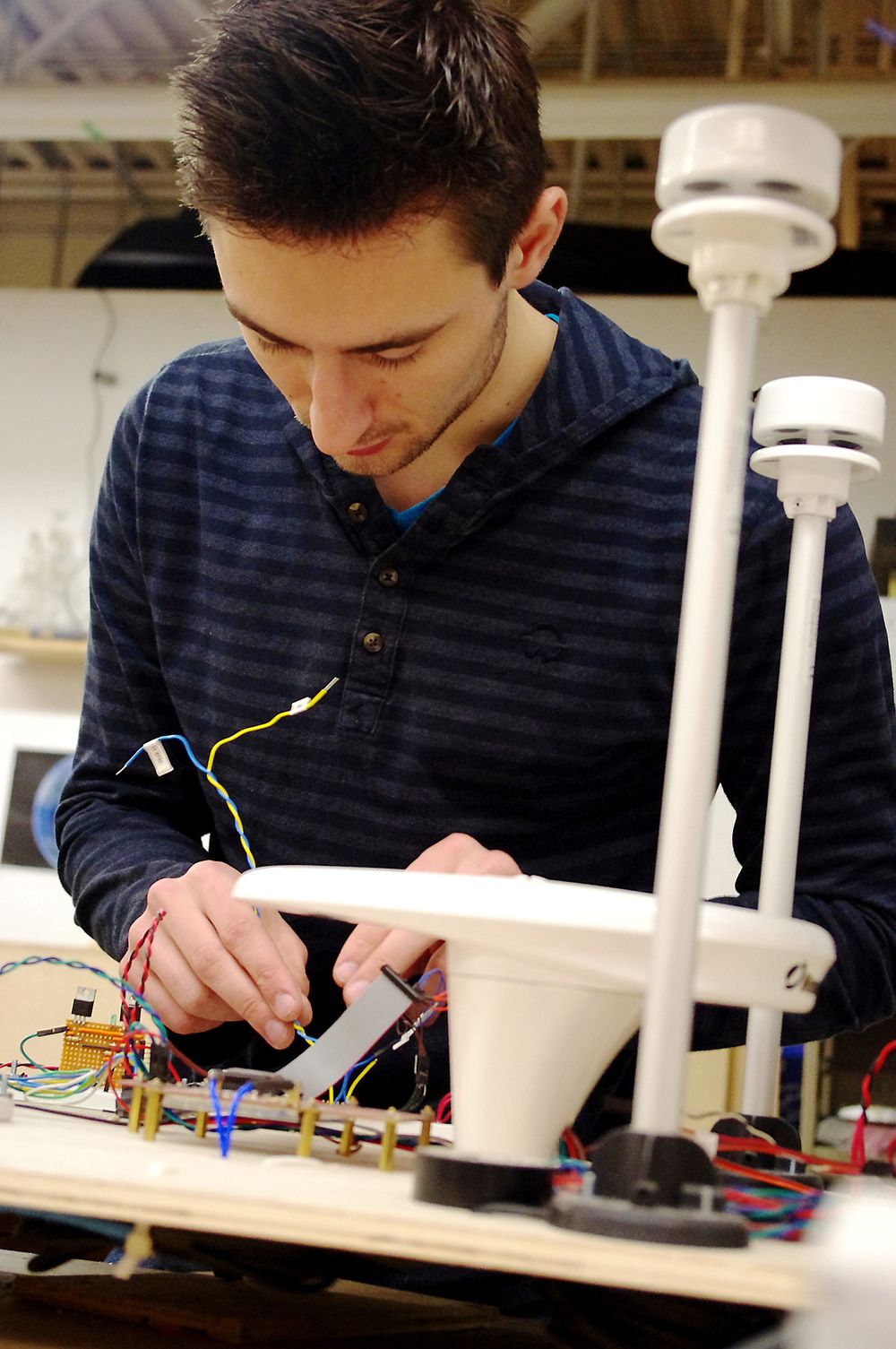
Det elektriske og elektroniske systemer bygget med redundans slik at en feil ikke skal ødelegge for andre systemdeler. Det benyttes Linux-maskiner og åpen kildekode.
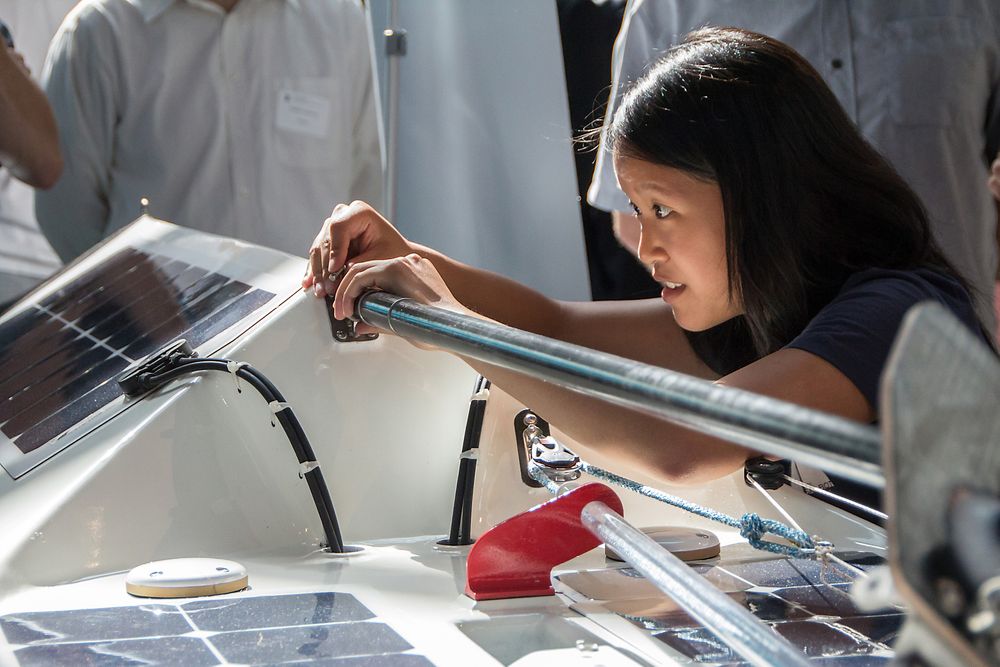
To GPS-systemer gir nøyaktig posisjon og vindsensoren benytter ultralyd for å redusere antall bevegelige deler. Til å supplere batteriene, er farkosten utstyrt med solceller tilpasset det tøffe marine miljøet.
Les også: Dette er Norges første fiskebåt med elmotor
Tre hovedsystem
For å kunne seile autonomt, kreves tre hovedsystemer; Navigasjonsystem, Antikollisjonssystem og kontrollsystem. Navigasjonssystemet skal kunne beregne eventuell ny rute og mer optimal seilas ut fra oppdaterte værmeldinger underveis.
Antikollisjonssystemet kan ikke benytte radar på grunn av begrenset krafttilgang. I stedet har fartøyet et AIS-mottakssystem for å se andre skips posisjon og et varmekamera. Ved hjelp av infrarødt lys og et bildesystem, tolkes objekter og omgivelser for å oppdage eventuelle hindringer.
– Dette måtte vi utvikle selv. Vi var i kontakt med blant annet NTNU, men eksisterende utstyr blir for stort og tungt, dessuten mye dyrere. Vårt system kommer på under 400 dollar. Vi tror dette har et stort potensial, sier Hansen til TU.
Les også: Mitt skip er lastet med...skip
Velger den minste fare
Kontrollsystemet erstatter mannskapet og er ifølge prosjektbeskrivelsen «vår digitale profesjonelle heltidsseiler». Det kontrollerer seilføring, rorstilling og trekker på informasjon fra alle mulige sensorer om bord for å ta de rette avgjørelser og manøvrere mest mulig optimalt.
– Systemet for ruteplanlegging og kollisjonsfare er programmert til å prioritere mellom farer. Skipskollisjon er farligere enn å havne i en storm. Systemet vil også velge den mest energisparende seilasen dersom batteriene kommer under et visst nivå, sier Hansen.
Studentene har kjøpt solcellene fra Italia og sydd sammen til å passe i Ada. Batteriene er avhengig av opplading underveis.
Over 100 solgt: For tre år siden ble de kalt «fremtidens skipsmotorer». Nå har de solgt over 100

Kjapp seilas
– Vi har lagt opp til en så rask kryssing som mulig. Båten kan gå i maks 10 knop, men vil sannsynligvis ligge rundt 6 knop i gjennomsnitt. Vi håper å kunne krysse på mellom to og fire uker. Andre har forsøkt sakte seilas tidligere, men ikke klart det, sier Hansen.
Motivasjonen for å bygge en autonom seilbåt er verken ære og berømmelse eller økonomisk gevinst, det er rett og slett en pasjon for programmering avansert elektronikk og seiling, ifølge UBCs hjemmesider. Det kan Hansen bekrefte.
– Jeg har en lidenskap for autonome systemer. Jeg har registrert at det er gjort lite på det innen maritim sektor, sier Hansen.
Les også: Nå har også dette norske skipet byttet ut diesel med gass
Skape egen bedrift
Han er ikke bekymret for sin egen framtid. Han vil ikke forlate Canada.
– Jeg har et stort nettverk her og fått noen jobbhenvendelser. Det er mulig jeg vil prøve å lage min egen bedrift basert på noe av det vi har gjort i prosjektet, sier Hansen.
Seilbåten Ada er oppkalt etter matematikeren Ada Lovelace, sett på som den første til å utvikle en algoritme som skulle utføres av en maskin.
Les også: «Rundt 25.500 hestekrefter jobber. Det begynner å vibrere i dørken under oss»
Norsk outsider
Ifølge hjemmesidene til regattaen Micro Transatlant er det bare to team som har prøvd seilasen i år.
I en liste over team som har mål om å delta, er det ett fra Norge; Autonomus.
Ut fra prosjektbeskrivelsen, har teamet en god del igjen før de kan få sin seilbåt til å gjøre stort annet enn å seile fra A til B, det vil si ferdig programmert strekning ut fra GPS-koordinater, uten å kunne endre kurs og manøvrere ut fra ny informasjon underveis.





