Selvkjørende biler er ventet å bli en viktig del av vår hverdag om bare få år. For de fleste er nok konseptet fremdeles futuristisk. Vi har alltid kjørt bilen selv. Men tanken om biler som kjører selv er langt fra ny. En rekke konsepter er vist fram siden 1930-tallet.
Da ble et konsept med veier med elektromagnetiske «spor» foreslått av den amerikanske industridesigneren Norman Melancton Bel Geddes. Han samlet senere disse tankene i boken «Magic Motorways» i 1940.
De første virkelige forsøkene på å lage noe autonomt, altså som kan ta avgjørelser basert på omgivelsene, ble demonstrert på 1980-tallet. Mercedes-Benz viste blant annet frem en varebil som kjørte seg selv – på en tom vei.


I Teknisk Ukeblad nummer 6 i 1984, avviste BMWs sjef for førutvikling elektronikk, dr. ing. Hans Dieter Fournell, at selvkjørende biler var noe som lå i nær fremtid.
Den gang inneholdt BMWs biler en del elektronikk. Utfordringen var først og fremst å pønske ut hvilke komponenter i bilen som kunne dra nytte av mikroprosessorer.
– De tror ikke på bilen som en selvkjørende automat der føreren bare er en overvåker, spurte TUs reporter.
– Overhodet ikke. For hva slags vei- og gatenett skulle ikke en slik løsning kreve? Hvor skulle vi få pengene til en slik utvikling fra? Nei, vi må konsentrere oss om det mest nærliggende og overlate det mer fancy til skaperne av science fiction-filmer, svarte dr. Fournell.
Han avviste blankt tanken om å «bruke en 64 KB datamaskin til å fortelle dem at det regner ute eller at De ikke har stengt døren».
.jpg)
Eramet etter tollsjokket: – Det blir høyere kostnader og større konkurranse
Nivå 2 av 5
Først i dag begynner bitene å falle på plass, og åpner for reelle muligheter for selvkjørende biler.
Regnekraften har blitt nærmest gratis, nødvendige sensorer har krympet i størrelse og blitt billige, og med elektrisk fremdrift har kjøretøyene generelt blitt enklere i konstruksjon.
Tesla er et godt eksempel. De har tatt tilgjengelig teknologi, koblet det opp mot datamaskiner med programvare som kan vurdere omgivelsene, og gjort det mulig å la bilen kjøre selv under visse omstendigheter.
Men dette er bare et steg på veien mot biler som kan kjøre seg helt selv.
Autonomi-nivåene
SAE har utviklet standarden J3016, som klassifiserer fem nivåer av automasjon.
Nivå 0 - Ingen automasjon: Føreren må ha all oversikt og treffe alle nødvendige tiltak.
Nivå 1 - Føreassistanse: Føreren overvåker miljøet, mens systemet kan ta seg av noe styring, eller aksellerasjon og bremsing. Typisk adaptiv cruise control eller lignende.
Nivå 2 - Delvis automatisering: Kontrollerer to primære kontroller, som hastighet og styring, mens føreren fremdeles har ansvaret for å overvåke omgivelsene, og må ta over kontroll dersom systemet ikke kan utføre oppgavene.
Nivå 3 - Automasjon under visse omstendigheter: Er det første hvor systemet overvåker omgivelsene, tar avgjørelser om for eksempel når bilen skal foreta en forbikjøring, sette på blinklys og annet, og kan brukes i alle situasjoner. Biler på dette nivået kan utføre kjøringen på egen hånd, men det forventes at føreren skal kunne ta over kontrollen ved behov.
Nivå 4 - Høy automasjon: Som nivå 3, med unntak av at systemet på egen hånd vil kunne treffe tiltak dersom føreren ikke reagerer. Det kan for eksempel være å stanse bilen.
Nivå 5 - Full automasjon: Systemet tar seg av alle oppgaver, overvåker omgivelsene, og fungerer i alle situasjoner. Kan gjøre alle oppgaver en menneskelig fører normalt vil gjøre. Nivå 5-biler kan i praksis designes uten ratt og pedaler.
Graden av autonomi i kjøretøy er definert av SAE (Society of Automotive Engineers).
I realiteten har ingen lansert kommersielle produkter over nivå 2. At Tesla, den ledende aktøren i markedet er på nivå 2, sier litt om hvor lang tid det faktisk tar å utvikle disse bilene.
Aktører som Ford forestiller seg å lansere kommersielle produkter på nivå 4 i 2021.


Waymo og Uber er blant aktørene som utvikler biler på nivå 5, men disse er sannsynligvis mange år unna kommersialisering.
Google har jobbet med selvkjørende biler siden 2008, og planla å lansere selvkjørende transport som en kommersiell tjeneste i 2018. Det har ennå ikke skjedd. Likevel er det Google som har kommet lengst med kjøretøy på nivå 5.
At Ubers selvkjørende Volvo XC90 var involvert i en dødsulykke i 2018 var et tilbakesteg for selvkjørende biler.
Dette skal førerløse biler løse
Likevel jobber «alle» med å utvikle selvkjørende biler, fra transporttjenesten Uber til Volvo, som pønsker på selvkjørende lastebiler.
Førerløse biler handler ikke bare om å gjøre hverdagen sutalaus, men om å løse utfordringer som forurensing, køer og ulykker.
Ifølge forskning fra Kongliga Tekniska Högskolan i Stockholm, kan én delt førerløs bil erstatte 14 vanlige biler.
Selvkjørende busser kan sluse folk til og fra kollektivknutepunkter. Et slikt konsept er allerede testet i Norge. I Oslo er selvkjørende busser allerede i trafikk på en ørliten rute mellom Vippetangen og Kontraskjæret.
Det utvikles også løsninger som skal kunne gjøre vanlige biler selvkjørende. Comma.ai er et eksempel. De har hevdet at når produktet deres er ferdig, vil mange kunne konvertere bilen sin til en delvis selvkjørende bil for 1000 dollar.
.jpg)
Bruker enkel teknologi
Teknologien som brukes er egentlig veldig enkel. Bilen må ha noen sensorer som kan danne et bilde av hva som foregår rundt bilen, og en datamaskin som tolker dataene og styrer gass, brems og styring.

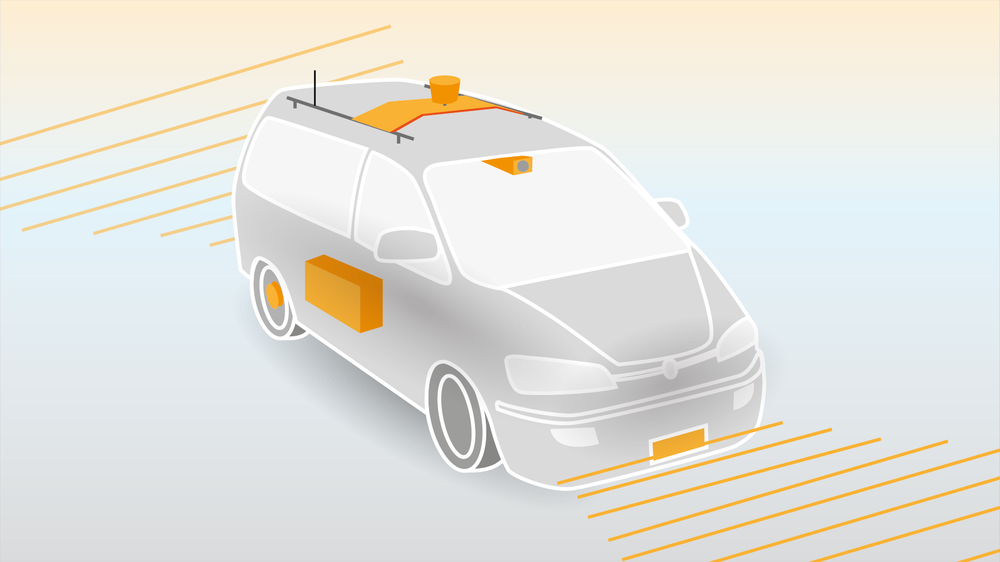
Nesten alle bilprodusenter som utvikler helt selvkjørende biler bruker lidar i tillegg til kamera og radar for å danne et oversiktsbilde. Enkelte, som Comma.ai, mener at det egentlig er nok med ett kamera.
Lidar (light detection and ranging) brukes til å måle avstanden til fysiske objekter ved å sende ut lys og måle refleksjonene. På prototyper av selvkjørende biler er ofte en slik lidar plassert på taket, og spinner rundt for å danne et 360 graders bilde av omgivelsene.
Dette vil neppe bli å se på produksjonsbiler. Slike lidarer er dyre og kompliserte, og inneholder finmekanikk. De kan koste flere ti tusen kroner. Nå er det utviklet kommersielle produkter som er mindre og langt billigere (rundt 2500 kroner).
Selv disse må plasseres på taket. Trolig vil dette endre seg, ettersom det utvikles små «solid state» lidarer som kan plasseres rundt bilen i stedet, til en estimert pris på under 100 kroner. Disse har ingen bevegelige deler.

Matforsyningen er lammet
Radar og ultralyd
Radar brukes også. Disse fungerer omtrent som en lidar, men sender ut radiobølger. Radaren måler tiden det tar for ekkoet å returnere, og egner seg best for å måle større objekter. En radar fungerer også under alle værforhold. Radarane er fastmonterte, og dekker som regel området foran og bak bilen.
I Googles selvkjørende bil, som illustrasjonen over er basert på, er det også montert ultralydsensorer i hjulene. Det gjør det mulig å måle avstand til objekter som er svært nær bilen, som fortauskant eller andre kjøretøy.
Tesla har ultralydsensorer rundt bilen. Disse gir et 360 graders bilde av objekter fra omtrent fem meters avstand.
Kameraet filmer det som skjer foran linsen, og registrerer skilt, posisjon i veien, andre trafikanter, veimerking og annet.
Kart
Kart må også på plass. For en selvkjørende bil holder ikke å bare ha et vanlig kart og en GPS. For eksempel er Ubers selvkjørende biler, som for tiden testes ut i Pittsburgh i USA, avhengig av at området den kjører i er kartlagt på forhånd.
Kartene er svært detaljerte, og bilene kan ikke kjøre seg selv i områder uten slike kartdata, tross alle sensorene.
En GPS alene er ikke nøyaktig nok. Lokale forhold kan gi rimelig stor unøyaktighet, særlig i «urbane juv» med mange høye bygninger.
GPS til sivilt bruk kan ikke ta i bruk ionosfærisk korreksjon, slik militære GPS-enheter kan. Derfor måles GPS-signalet mot andre sensorer, som gyroskop og høyde- og hastighetssensorer, i tillegg til AGPS. AGPS forutsetter en tilkobling til mobilnettet for å bidra til økt nøyaktighet.
Avansert programvare
Programvare må også kunne sammenfatte opplysningene sensorene gir, og danne seg et bilde av omgivelsene. Deretter tas avgjørelser basert på informasjonen.
Programvaren må kunne forutse situasjoner som er i ferd med å oppstå, for eksempel om en gående er i ferd med å bevege seg ut i veibanen, eller tolke hva en bil med blinklyset på trolig vil gjøre.
Her er et sett med regler kodet inn, som for eksempel at bilen ikke under noen omstendigheter skal kjøre på rødt lys og må overholde vikeplikt.

Har vært fremtidens teknologi i 25 år – nå skjer det
Menneskelige vurderinger
Bilkjøring består imidlertid av en rekke andre situasjoner hvor vi må bruke dømmekraften for å ta avgjørelser. Noen av disse avgjørelsene kan innebære å bryte trafikkreglene.
Et eksempel kan være at vi må krysse heltrukken sperrelinje i veien for å kunne passere et stillestående kjøretøy. Om en selvkjørende bil er programmert til å aldri krysse en sperrelinje, betyr det i så fall stopp. Programvaren må kunne avgjøre at det i noen tilfeller er greit å bryte reglene.
I tillegg bør programvaren ta høyde for uskrevne regler i trafikken. For eksempel at man reduserer hastigheten litt for å gi andre trafikanter anledning til å kjøre inn på veien, selv om de har vikeplikt.
Et spørsmål er om data som bilene bruker for å lære seg å håndtere situasjoner, vil bli delt med andre. Teslas Autopilot deler nå data med andre biler med Autopilot, slik at andre biler som kommer til en potensiell hindring allerede vet hva som venter.
Infrastruktur

I tillegg til biler med sensorer og avansert programvare, vil trolig veiinfrastrukturen spille en stor rolle.
Tidligere samferdselsminister Ketil Solvik-Olsen har tidligere sagt til Teknisk Ukeblad at ITS-systemer, hvor informasjon om veiforhold og annet utveksles mellom biler og basestasjoner langs veien, blir nødvendig.
Dette kan inkludere skilt som sender data til bilene, eller at bilene sender informasjon om egen hastighet og retning til andre biler i veikryss.
I tillegg har Solvik-Olsen tatt til orde for at veimerking må ta hensyn til at selvkjørende biler skal kunne lese den.
Det er imidlertid ikke sikkert at bilene vil være avhengig av digital infrastruktur eller spesiell veimerking. Kartleverandører som Here og Tomtom jobber med å utvikle svært detaljerte kart som skal gjøre det mulig for biler å kjøre på veier hvor for eksempel veimerkingen er dårlig.

Bensinbilen er nesten død i Norge. I ett fylke har det bare blitt solgt én
Optimistene: Tar over innen 2030
Når de selvkjørende bilene vil begynne å bli et vanlig syn, er fortsatt ukjent. De mest optimistiske anslagene sier at selvkjørende biler har tatt helt over innen 2030. EUs forskningsråd for transort, ERTRAC, anslår at helt selvkjørende biler når markedet mellom 2024 og 2030 (PDF).

Sophia Holst er engangement partner i Qvartz, og jobber med autonom og elektrisk mobilitet. Hun er medforfatter av en ny rapport som tar for seg hvor langt utviklingen har kommet, og hvem som ligger an til å ta ledelsen.
Hun trekker frem amerikanske selskaper som Waymo og Cruise. Men rett bak disse kommer kinesiske aktører. Holst tror Kina tar innpå det neste halvannet året, og at Kina kan overta ledelsen innen tre til fem år.
Kina investerer 235 ganger mer
Det skyldes først og fremst den kinesiske modellen. Myndighetene har bestemt at dette er noe Kina skal bli best på. Kina har en ambisiøs «Made in China 2025»-plan, som legger opp til at ti prosent av alle solgte biler i landet skal være helt selvkjørende.
Sammenlignet med Europa og USA tar Kina grep fra toppen, setter ambisiøse mål og investerer deretter. For eksempel investeres det 120 milliarder amerikanske dollar i infrastruktur og å bygge opp en talent-pool gjennom utdanning. Til sammenligning investeres det 510 millioner dollar i Europa, ifølge Holst.
Kina investerer altså 235 ganger mer i teknologi som skal gjøre bilene selvkjørende.

I Europa og USA kommer initiativet fra bunnen, ved at ledere i teknologiindustrien og myndigheter kommer sammen for å se hvordan teknologien kan støttes.
– Dette er en mye tregere og mer stegvis vei til endring.
Holst mener Europa ligger dårlig an.
– Det tar altfor lang tid. Det er det samme med utdanning av spesialister. Hvor mye som investeres er en drivende faktor.
Hun viser til at kinesiske selskaper tester på vei i Kina, men også i California side om side med vestlige bilprodusenter. I Europa er det foreløpig kun Storbritannia som i år har åpnet for testing, mens det i EU generelt ikke er ventet regelverk som tillater testing før tidlig neste tiår.

Denne gjør det mulig å la bilen gi huset strøm – nå kan du kjøpe den
Kan løse helt reelle problemer
Kina har dessuten mange gode grunner til å gå for utvikling av teknologien raskt. Holst tror Kina vil være først ute med å sette den ut i livet.
– De har store problemer med forurensing og trengsel i de store byene, og mange problemer kan løses med elektriske og selvkjørende biler.
At sikkerhetskulturen er en annen enn i Vesten, vil også bidra til at det går raskere å sette dette ut i livet. Kinesiske forbrukere er dessuten langt mer teknologivante enn vi er i vesten.
Det ser også ut til at hypen har lagt seg litt rundt selvkjørende biler. I begynnelsen trekkes alle mulige bruksområder frem, men etter hvert blir man mer edruelige. Bilprodusentene ser kanskje mer balansert på hvilke utfordringer som må løses i dag, enn de gjorde for noen få år siden.
Neste nivå: Ta blikket fra veien
Men utviklingen fortsetter. Bil- og utstyrsprodusentene er på vei med nivå 3-teknologi.
– Nivå 3 er mer automatisk enn tidligere nivåer, men krever fortsatt at det er et menneske bak rattet, sier Holst.
Det er «eyes off»-teknologi, som betyr at du kan konsentrere deg om andre ting enn trafikken, så lenge du er klar til å ta over styringen.
Nøyaktig hvilke store samfunnsendringer dette vil forårsake er vanskelig å få øye på, mener Holst. Når nivå 3 er tilgjengelig, vil bilene for det meste oppleves som tradisjonelle biler uansett, da det til enhver tid skal være en sjåfør bak rattet.
Dermed får vi neppe se noen store samfunnsomveltninger før bilene kan gjøre hele jobben på egen hånd.
Mye annet må dessuten på plass. Infrastruktur som inkluderer alt fra skilt til telekommunikasjon må fungere. Bilene må dessuten være i stand til å løse ulike situasjoner på egen hånd.
Et eksempel er en vag situasjon, et skilt som peker feil vei, som vi mennesker helt intuitivt vil klare å tolke. For en maskin kan slik tvetydighet være umulig å tolke. I tillegg må lovverk tilpasses en virkelighet som også inkluderer selvkjørende biler.
Til syvende og sist står det på programvaren. Maskinvaren som trengs, finnes allerede.
– Bilene kommer til å bli mer som kjørende smarttelefoner. Programvare blir viktigere enn maskinvare, og det kommer til å bli utfordrende for bilprodusentene, sier Holst.
Hun sier at nøkkelspørsmålet er hvem som kommer til å «eie forbrukerne» i fremtiden. Det er sannsynligvis den aktøren som eier dataene, og ikke maskinvaren.
Tror på slutten av neste tiår

Nye ukrainske missiler: – Reduserer ubalansen i langtrekkende våpen til Ukrainas fordel
Så når kan vi sette oss i baksetet til en bil som henter oss helt på egen hånd?
Tesla-sjef Elon Musk hevdet for 3,5 år siden at det innen to år ville bli mulig å kjøre fra New York til Los Angeles uten fører.
Holst er blant dem som ikke tør spå en snarlig selvkjørende revolusjon. Vi spør når hun tror helt selvkjørende biler på nivå 4 og 5 blir en realitet.
– Jeg ville nok vært mer positiv tidligere. I dag tror jeg ikke det skjer før i slutten av neste tiår.
Holst tror Kina kommer først på banen, at endringer kan skje raskt og at utviklingen kan gå fortere.