For tre år siden undersøkte Sintef om slangeroboter kunne hjelpe på bevegelighet og framkommelighet i operasjoner på Mars.
På oppdrag fra ESA går nå forskerne videre i arbeidet, og i en forstudie ser de på teknologien og andre muligheter av bruk av roboter i rommet.
– Det mest fancy er vel mulige aktiviteter på månen og på kometer, sier Aksel Transeth ved Sintef.

Det mest nærliggende er å undersøke hvordan slangeroboter kan hjelpe astronautene på den internasjonale romstasjonen ISS til å vedlikeholde utstyr.
Moon Village
Det er nesten 50 år siden det første mennesket gikk på måneoverflaten. ESA mener neste store steg for menneskeheten kan være å samarbeide internasjonalt for å etablere en Moon Village på månen.
Denne landsbyen kan være en permanent base for vitenskap, næringsliv, turisme eller gruvedrift, og en brukbar plass for basen er Lava tubes – tunneler som det har vært lava i.
Å bygge her betyr at man unngår eksponering for skadelige elementer på måneflaten som for eksempel kosmisk stråling og meteoritter.
Men også lavatunneler trenger å inspiseres, for å se om det er mulig for mennesker å bo her, og det er her slangeroboter kommer inn som en mulighet.
På månen er gravitasjonen mindre. I tillegg kan lava tubes gå loddrett ned i overflaten. Så hvordan løser man utfordringene som oppstår rundt bevegelighet og framkomst?
- Billig, miljøvennlig og regulerbar: Nammos nye hybrid-rakettmotor er klar for lufta
Utforsking av kometer
ESA er også interesserte i å undersøke kometene. Siden disse kan komme langveis fra i verdensrommet, er håpet å avsløre noen av solsystemets hemmeligheter og få hjelp til å danne et bilde av hvordan solsystemet så ut før planetene ble dannet.
I 2004 sendte ESA opp romsonden Rosetta, som i 2014 satte ned landeren Philae på en komet kalt 67P/Tsjurjumov–Gerasimenko. Den hadde et system med harpuner som skulle holdt den fast etter at den var landet, men det virket ikke.
– Det er så godt som ingen gravitasjon på kometer. Prøver man å gå på overflaten, vil man fort kunne sprette av. Derfor må vi finne måter slangeroboter kan bevege seg rundt på en komet med en eller annen måte å holde seg fast underveis, forklarer Transeth.
- Norsk teknologi: Slangeroboter skal revolusjonere vedlikeholdet subsea
Inspeksjon og vedlikehold
For Sintef-forskerne er slangeroboter koblet til ISS det mest realistiske og nærliggende området. Her slipper man for eksempel problemer med lave/høye temperaturer.


ISS er den internasjonale romstasjonen hvor det hele tiden oppholder seg mennesker. De kjører eksperimenter for kolleger nede på jorda, og får tilsendt bokser med eksperimenter som skal gjennomføres i den vektløse tilstanden. Hvilke planter gror for eksempel i rommet? Hvordan foregår healing av sår i disse omgivelsene?
Dette er astronautenes hovedjobb. Men i tillegg er det svært mye jobbing i form av vedlikehold og inspeksjon som må til for å holde en romstasjon i drift. Å få frigjort tid er derfor viktig for dem i en travel hverdag.
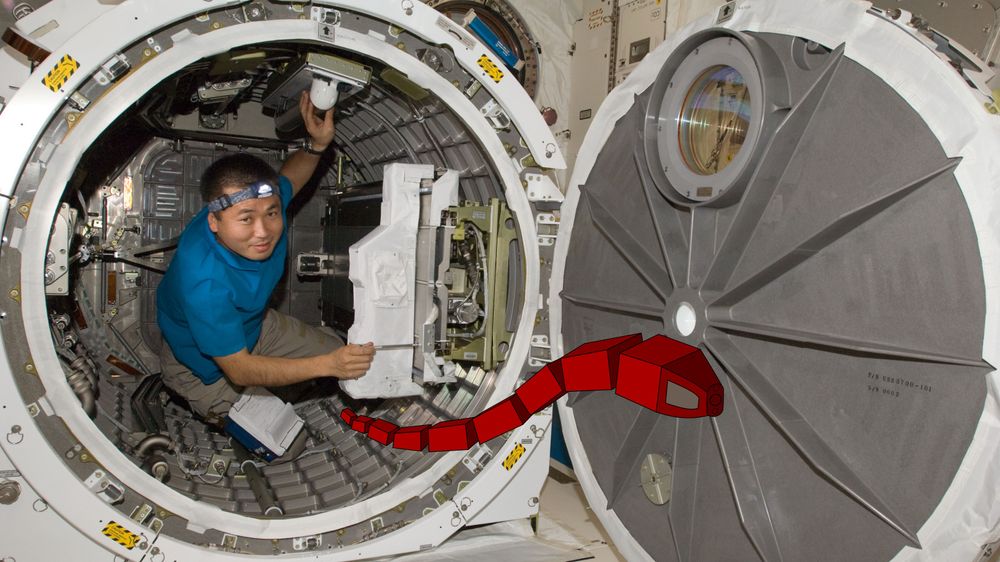
– En robot kunne kanskje gjort noe av dette inspeksjons- og vedlikeholdsarbeidet. Eksperimentene er plasserte i hylleseksjoner. Bak seksjonene kan det blant annet oppstå korrosjon, og for å avdekke dette trengs det inspeksjon. En slangerobot kunne ha krøpet bak seksjonene, inspisert og muligens også gjort lett vedlikehold, sier Aksel Transeth.
- Videreutvikler norsk teknologi hos Nasa: Norske studenter er med i prosjekt som skal finne liv på Mars
Krølle seg sammen, sno seg og skyte seg ut

Problemstillingene forskerne må løse for å lage et slikt slangerobotsystem, er mange.
Et viktig element blir å finne ut av hvordan en slangerobot skal komme seg fram på ISS. Siden ISS er i konstant fritt fall rundt jorda så «flyter» astronautene rundt på romstasjonen. De holder seg fast i ting og dytter seg fram når det trengs.
– Vi mener vi kan få roboten til å holde fast, krølle seg sammen og skyte seg ut for å treffe et nytt kontaktpunkt. I tillegg tror vi at den kan sno seg innimellom utstyr på ISS og dytte mot utstyret for å krype framover, slik biologiske slanger beveger seg på landjorda, forklarer Transeth.
Han påpeker at de må se på hvilke krav som må stilles til slangerobotsystemet. Hvilken type sensorer vil for eksempel kreves for at roboten skal forstå sine omgivelser godt nok? Hvilke teknologier er tilgjengelige i dag som kan oppfylle noen av disse kravene, og hvilke teknologier må utvikles? Hvor ligger usikkerhetene i forhold til hva som kan være mulig å få til?
En drone, Astrobee, vil snart komme i bruk på ISS. Denne skal fly rundt og gjøre inspeksjonsoppgaver. Forskerne tror de kan dra nytte av dronen siden den har en del teknologi som vil være lik den de kan bruke på slangeroboten.
- Nå har Nederland betalt 96 millioner kroner til Norge for å få den: Denne bryteren finnes kun i norske F-35-fly





