På Rikshospitalets Intervensjonssenter jobber leger og ingeniører sammen om å utvikle fremtidens operasjonsteknologi.
De ser på hvordan avanserte roboter, assistert av datamaskiner og bildedannende teknologi, kan gjøre operasjoner til en mindre belastende opplevelse for pasienten.
Går det som optimistene håper, vil fremtidens bypass-operasjoner utføres med en liggetid på dager istedenfor uker.
Den viktigste oppgaven til en fjernstyrt operasjonsrobot er å øke presisjonen og bevegelsesfriheten i forhold til konvensjonell kikkhullsteknologi. Ved hjerteoperasjoner i dag må pasientens brystkasse åpnes ved å sage opp brystbenet og skyve ribbena til hver side for å blottlegge hjertet.
I mange tilfeller må hjertet kobles fra åresystemet, og pasienten kobles til en hjerte-lungemaskin. Slike operasjoner er i dag rutine ved norske sykehus og risikoen anses lav.
Skalerer bevegelsen
- Kikkehullskirurgi i bukhulen, i knær og ved inngrep i andre områder av kroppen, fører til at pasientene slipper unna med mindre inngrep, kortere sykehusopphold og mindre sykefravær, sier sivilingeniør Ole Jakob Elle som forsker på ny kirurgisk robotteknologi ved Intervensjonssenter.
Utfordringen er å bruke kikkhullsteknologi på inngrep i brysthulen (thorax), det vil si på hjertet og lunger.
Bypass-operasjoner ved kikkhullsteknologi med konvensjonelle håndholdte instrumenter er umulig. Andre steder i verden har man ved hjelp av robotteknologien utført hjerteoperasjoner selv om det er vanskelig med dagens teknologi. Det er mer snakk om telemanipulering fra kirurgens side enn en selvstendig robot.
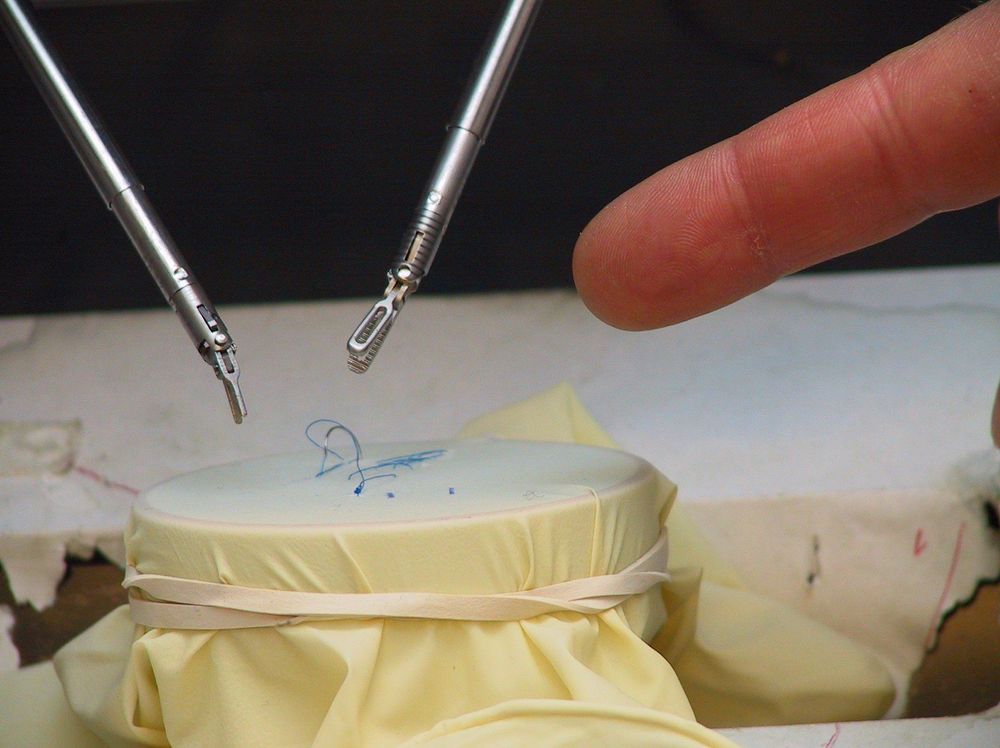
Instrumentene stikkes gjennom rør som festes i hull mellom ribbeina. Bevegelsesutslagene inne i kroppen må være svært små ved bypass-kirurgi. En av robotens fremste oppgaver er derfor å skalere ned bevegelsene til kirurgen.
- Når vi skalerer bevegelsene ned til en femtedel eller en tiendedel, oppnår vi meget stor presisjon som ikke er mulig med direkte manipulering, sier Elle. En annen stor fordel med roboten er at den filtrerer bort skjelving på hendene ved hjelp av en enkel lavpassfiltrering.


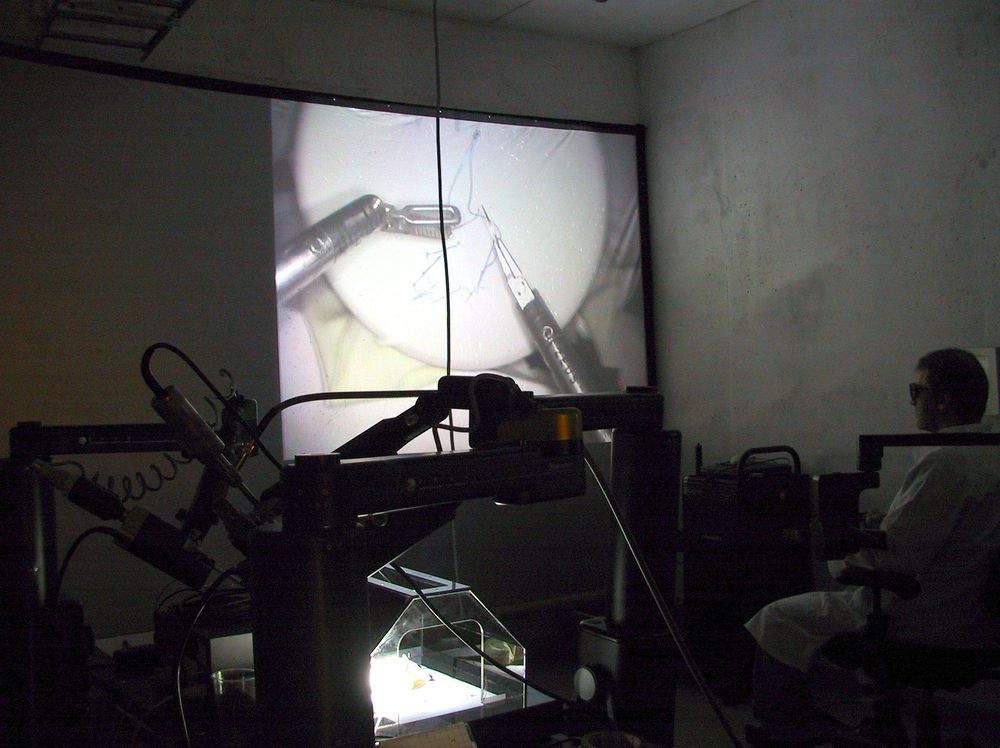
I dag benyttes roboten sammen med et todimensjonalt kamera (videoskop) som føres inn i kroppen, men Intervensjonssenteret jobber også med muligheten for å ta i bruk stereokamera som vil gi kirurgen tredimensjonalt syn. Høyre og venstre videokanal kan da presenteres kirurgen via et hodemontert display (HMD) med et lite LCD-display foran hvert øye.
Denne 3D-hjelmen er tung, festet til en signalledning og gir ofte brukeren kvalmefornemmelser. Derfor jobber man nå med muligheten til å benytte to overlappende polariserte bilder som projiseres på et lerret i stedet. Kirurgen vil da se tredimensjonalt ved å bruke polariserende briller, samtidig som andre også kan følge med på inngrepet.
Synkronisering
Å operere på et bankende hjerte inne i brysthulen er vanskelig. Hjertet stabiliseres mekanisk for å redusere bevegelsene. Ny teknologi utviklet ved Intervensjonssenteret kan eliminere problemet.
- Ved å måle hjertets bevegelser håper vi å kunne synkronisere både kameraet og manipulatorarmene, slik at legen kan forholde seg til hjertet som om det stod i ro, sier Elle. Bevegelseskompenseringen må skje helt uten faseforskyvning i systemet, og både nøyaktigheten og sanntidsegenskapene må være perfekte. Hvis ikke, skades hjertet.
En annen fremtidig forbedring vil være å gi kirurgen skikkelig tilbakekobling av kraft og følelse fra instrumentene.
- Haptisk tilbakekobling krever at vi utstyrer instrumentene med nye sensorer, aktuatorer og programvare, slik at kontaktkrefter og berøringsinformasjon (taktil tilbakekobling) føres tilbake til kirurgens armer og fingre. Klarer vi det, vil vi kunne gjenskape noe av det som kirurgen har tapt ved dagens kikkhullsteknologi i forhold til tradisjonelle metoder. Likevel tror jeg det vil ta fem til ti år før noen er ved målet, sier Elle.




