Maskinlæring er nyttig, men ikke nytt. Mange fagfelt har brukt det i mange år, men har kalt det noe annet. Innen kjemometri og kalibrering av mangekanals måleinstrumenter kalles det multivariat datamodellering og har vært i bruk i for eksempel matvareindustrien i mange tiår. Teknikken blir nå videreutviklet for kontinuerlig analyse av teknisk stordata, blant annet ved gruppen for stordata kybernetikk ved Institutt for teknisk kybernetikk på NTNU, hvor man jobber med å inkludere både fysikk- og datadrevet modellering i et felles domene.
Denne typen hybridmodellering er generisk, men egner seg spesielt for tekniske stordata, slik som automatisk analyse av termisk video. Hensikten er å gi ingeniører og operatører gode verktøy for sikrere og bedre drift av teknisk utstyr eller industrielle prosesser – verktøy som er transparente og forståelige.
Teknisk maskinlæring kan fange opp systematiske variasjonsmønstre i store datastrømmer, skille dem fra tilfeldig støy og forbigående målefeil og gjøre dem tolkbare for mennesker. Grunntanken ligner på menneskets opplevelse av musikk: Fra en kakofoni av signaler som strømmer fra et mangestrengs instrument, eller et helt orkester av instrumenter, hører vi de underliggende rytmene og harmoniene etter hvert som de strømmer på. Og når man gjenkjenner hva som er godlyd, kan man også oppdage ulyd – som hosting og brannalarm.

Vi illustrerer her denne typen tolkbar maskinlæring gjennom et eksempel med fjern-overvåking av en stor dieselmotor under varierende belastning, ved hjelp av kontinuerlig termisk video-analyse.
Kontinuerlig termografi fra fastmontert kamera
Et termisk videokamera som observerer en prosess eller teknisk utstyr, kan levere svært informative fjernmålinger fra mange ti- eller hundretusen romlig plasserte «termometere»(piksler) flere ganger i sekundet, år ut og år inn.
Med teknikken som her illustreres, kan man tolke og utnytte informasjonsinnholdet i slik tekniske stordata, både i sanntid og over lange tidshorisonter, ved hjelp av beskjeden maskinvare. Ikke all maskinlæring kan, eller bør, kjøres i ressurskrevende serverparker.
Målt temperatur kan være interessant i seg selv, for eksempel for smelteprosesser, biologiske steriliseringsprosesser osv. Men kontinuerlig termisk videodata kan også reagere indirekte på skjulte endringer inne i motorer, smelteovner, kjøleutstyr, tanker og rørledninger samt elektrisk utstyr. Disse kan skyldes ønskede elektriske eller kjemiske prosesser, for eksempel i metallurgi, forbrenning og andre endo- og eksoterme reaksjoner, eller indre omrøring og fyllingsgrad. Eller uønsket friksjon, overledning, endringer i godsets varmeledningsevne, varmekapasitet eller overflateegenskaper, samt gass- og væskelekkasje.
Termisk overvåking av en forbrenningsmotor
Figur 1 illustrerer termisk kamera-overvåking av en kraftig diesel-motor kombinert med vår tolkbare maskinlæring. Resultatene som vises, er basert på et kommersielt prøveprosjekt i Norge, men anonymisert, og modifisert litt av didaktiske hensyn.
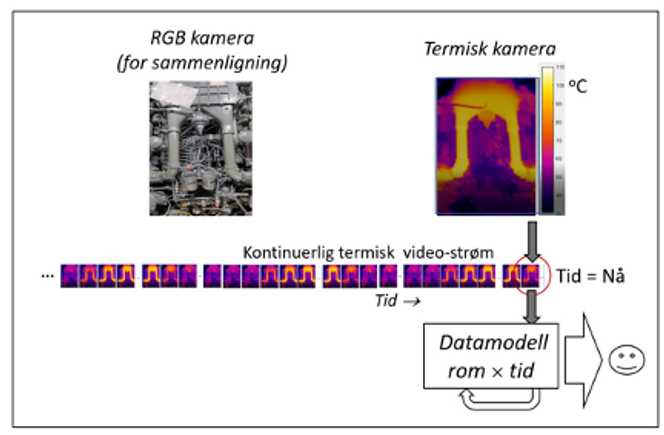
Denne kontinuerlige videostrømmen representerer en stor datamengde som raskt vil fylle hukommelsen i en vanlig PC. Men Figur 2 viser hvordan den kontinuerlige termiske video-strømmen kan behandles i sanntid i en autoenkoder-algoritme, som oppdager og beskriver de fysiske variasjonsmønstrene i den målte termiske videoen – i tid og i rom:
Først oppdages variasjonsmønster # 1, som beskrives med produktet av et romlig mønsterbilde (dets «harmoni») og en enkel tilstandsvariabel i tid (dets «rytme»). Alle senere bilder blir modellert ved projeksjon på dette mønsterbildet, så denne tidsserien # 1 blir etter hvert lengre og lengre.
Etter en stund oppdages et nytt variasjonsmønster, # 2, i videostrømmen, og senere også enda et variasjonsmønster, # 3, hvert av dem som produktet av sitt romlige mønsterbilde og sin temporale tilstandsvariabel. Liksom variasjonsmønster # 1 kvantifiseres også disse oppdagede mønstrene heretter i hvert nytt bilde.
I fortsettelsen forklarer nye kombinasjoner av de samme tre oppdagede mønsterbildene det meste av temperaturvariasjonene, både med og uten kraftig motorbelastning. Men skulle det senere dukke opp nye variasjonsmønstre – forventede eller uventede – blir også de detektert automatisk og inkludert som en liten utvidelse av den bi-lineære rom x tid-modellen. Denne automatisk genererte termiske modellen vokser altså langsomt i kompleksitet – men kun etter behov. Modellen holdes så enkel som mulig.
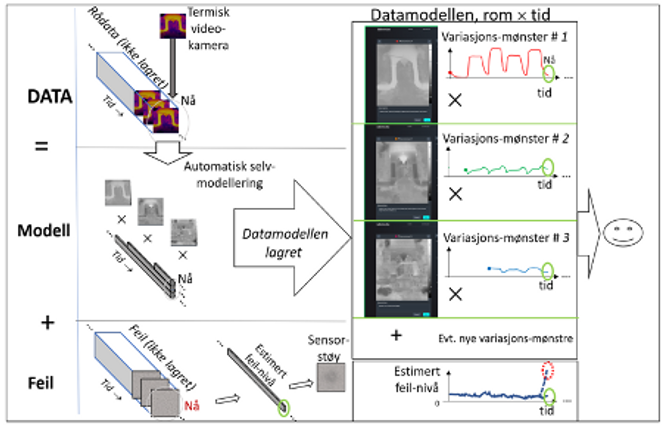
Strømmen av videobilder modelleres altså som en sum av systematiske variasjonsmønstre, der hvert mønster er modellert som et romlig mønsterbilde x en tidsserie (tilstandsvariabel).
Når et nytt termisk bilde således er blitt tømt for sin systematiske rom x tid variasjon, oppsummeres bildets umodellerte feil (støy osv.) for statistisk modelloptimering. Svært abnorme feilbilder gir sanntids feilvarsling og kan eventuelt lagres for etter-analyse. Men deretter slettes både det termiske bildet og dets støybilde fra PC-ens hukommelse. Det eneste som beholdes, er den komprimerte modellen, bestående av de (få) mønsterbildene og deres tilhørende tilstandsvariabler, samt et estimat av generelt støynivå i tid og rom.
Men etter lengre tid vokser selv denne sterkt reduserte rom x tid datamodellen til en betydelig datamengde. Så den lagres også unna, i intervaller. Ut fra den sterkt komprimerte rom x tid modellen, kan man når som helst rekonstruere hele videosekvensen, bortsett fra den uinteressante målestøyen, som er vanskelig å komprimere, og eventuelle unormale avvik.

Hold mennesket i loopen!
Operatøroversikt: Øverst i Figur 3 illustreres det målte temperaturbildet, dets rekonstruksjon (summen av modellerte tid x rom mønstre), samt dets feilbilde – litt stilisert – for et normalt og et unormalt driftsøyeblikk. Rekonstruksjon kan brukes til å visualisere prosessen for operatører i sanntid, som om de så på den med egne øyne. Slik visualisering kan motvirke fremmedgjøring. I denne applikasjonen var det nemlig forbudt for operatører å oppholde seg nær maskinen under drift, av sikkerhetshensyn.
Feilbildet gir automatiske varslinger dersom uventede mønstre og trender oppdages. Da må erfarne folk vurdere: Er dette et nytt, men ufarlig termisk variasjonsmønster som kan inkluderes i modellen for ettertiden? Eller er det noe uventet og skummelt, som krever øyeblikkelig nødstopp: Gasslekkasje, sprekk eller manglende kjøling?
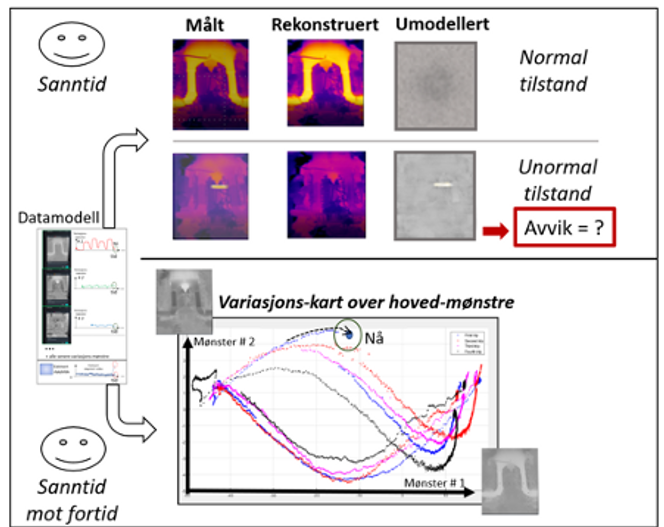
Ekspertoversikt: Som illustrert nederst i Figur 3, kan man også kartlegge prosessen over lengre tid, uten å bli overveldet av datamengden. De to første variasjonsmønstrene er her plottet mot hverandre, slik at hvert punkt representerer ett tidspunkt, inklusive "Nå"-punktet til enhver tid.
Dette hovedkartet viser hvordan dieselmotoren ved gjentatt oppkjøring og nedkjøring har fulgt lignende spatio-temporale spor, for de to første variasjonsmønstrene. Imidlertid viser figuren en langsom mønster-drift ved gjentatt opp- og nedkjøring av dieselmotorens belastning over lengre tid.
Begrensninger og muligheter
I kompliserte anvendelser, der dataene er påvirket av svært mange ukjente årsaker, er dagens black-box maskinlæring fra kunstig intelligens sannsynligvis nødvendig – foreløpig. Men det setter store krav til både treningsdata og feilvarsling. Og for mange typer tekniske stordata er dette fremmedgjørende overkill.
Den bi-lineære selvmodelleringen egner seg best for systemer med et begrenset antall systematiske variasjonsårsaker, pluss tilfeldig støy og eventuelle unormale endringer. Mange tekniske systemer er slik. Da er denne fysiske maskinlæringen en fordel, særlig hvis man vil forstå hva som skjer.

NTNU med nytt fagfelt: Mener det kan gi bedre styring av statsøkonomien