De mekaniske assistentene arbeider i en stor rød bygning som minner mer om en låve enn et industribygg.
Les også: Kjøttpakkesenter sprer ferskvare på en helt ny måte
Håndterer produksjonsøkning
Den glir diskret inn i området blant gårder og våningshus.
Daglig leder og pølsemaker Magne Østby forteller til Automatisering at selskapet har investert 3-4 millioner kroner i det avanserte pakkeriutstyret. Bakgrunnen er etablering i Sverige og forventet produksjonsøkning på 15 prosent årlig.
- Nå klarer vi produksjonsveksten uten å ansette flere i pakkeriet, forklarer han.
Pølsemakeren peker også på at gjentatte løft av bakker på 15 kilo er risikabelt for ryggen. Dessuten stables eskene bedre på pallene, noe som er godt nytt for transporten. Og sist, men neppe minst, pølsepakkeriet jobber i pausene.
- Anlegget kjører under lunsjen og når vi går til middag, sier Østby.
Lokal leverandør

Vom og Hundemat har en omsetning på 30 millioner kroner. Investeringen viser en sterk tro på at våre firbente venner skal få kose seg med pølser også i tiden framover. De er som oftest laget av kylling, laks og slakteavfall. Mange storkunder har sine egne resepter.
Det er Dynatec i Askim som har levert det nye anlegget. Østby forteller at nærheten var viktig, og at prisen var overkommelig.
- I oppstartsfasen har de stilt opp døgnet rundt, men leverandøren gjør også mye via fjernoppkopling, sier han.
Les også: VW har ansatt samarbeidsrobot
Ompakking
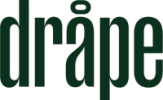
Etter produksjon i pølsemakeriet hurtigfryses godbitene. Pølsene kommer i tre størrelser, på en halv, én og fem kg. Prosjektleder Joakim Sjödin hos Dynatec forklarer at pølsene kommer i plastbakker på pall fra fryseriet. Ompakking står på programmet i det helautomatiske pakkeriet. Sjödin kaller plasseringen av pølsene i bakkene vilkårlig strukturert, altså ikke helt hulter til bulter.
Kjappere enn Fido
Det er stor forskjell på de to robotene som er i sving i cellen. Hovedroboten er døpt Kristoffer II etter en flittig operatør som arbeider i selskapet. Det er en rugg som løfter inntil 180 kg på strak arm over 3 meter. Sjödin forteller at den betjener flere stasjoner. Det avanserte multiverktøyet som lemper bakker og håndterer mellomleggspapirer veier alene 40 kg.


Litt spøkefullt kan vi si at det Kristoffer II har av muskler har den lille roboten fått i hjernekraft. Den seksaksede, sekskilos roboten plukker hundepølser raskere enn Fido drømmer om å jafse dem i seg. De frosne pølsene ankommer altså maskinen delvis strukturert, og kommer ut sirlig plassert i esker fra ompakkingen.
Les også: RFID styrer lakkeringsrobotene
3D-vision
For å finne hvor pølsene ligger, har den norske vision-spesialisten Tordivel utviklet 3D-maskinsyn sammen med Dynatec. Det er pc-basert vision som gjelder. Prosjektlederen forteller at det er tre kameraer i sving. Et par håndterer konvensjonell 3D, mens en laser sørger for grovidentifisering av pølsene, som ligger i to lag.
En vakuumgriper i roboten gjør jobben med å suge til seg pølsene. Robotarmen stopper ikke. Den er bare nede og snapper pølsene. Men i motsetning til Fido, legger lillebroren til Kristoffer II pølsene forsiktig ned i esker, også uten å stoppe.
To tonn i timen
Plukktiden er på rundt halvannet sekund, kanskje ikke all verden om vi for eksempel sammenligner med tradisjonelle plukk- og plasser-applikasjoner hvor alt er kjent på forhånd. Men oppgavene er selvsagt av en helt annen kompleksitet.
- Robotene tygger seg gjennom to tonn pølser, hver av dem på 1 kilo, i timen, kommenterer pølsemaker Østby.
Det er mer robot- og vision-snacks. Lasermålere brukes for å finne den nøyaktige plasseringen av pallene og hvordan bakkene er organisert på dem. Prosjektleder Sjödin forklarer at den store roboten, altså Kristoffer II, blant annet kontrollerer om bakkene er stablet helt perfekt.
- Stabelen kan bli litt skjev, og da er det vanskelig for roboten å treffe, sier han.
Les også: Lilleborg vasker bort den gamle styringen
Mer brukervennlig
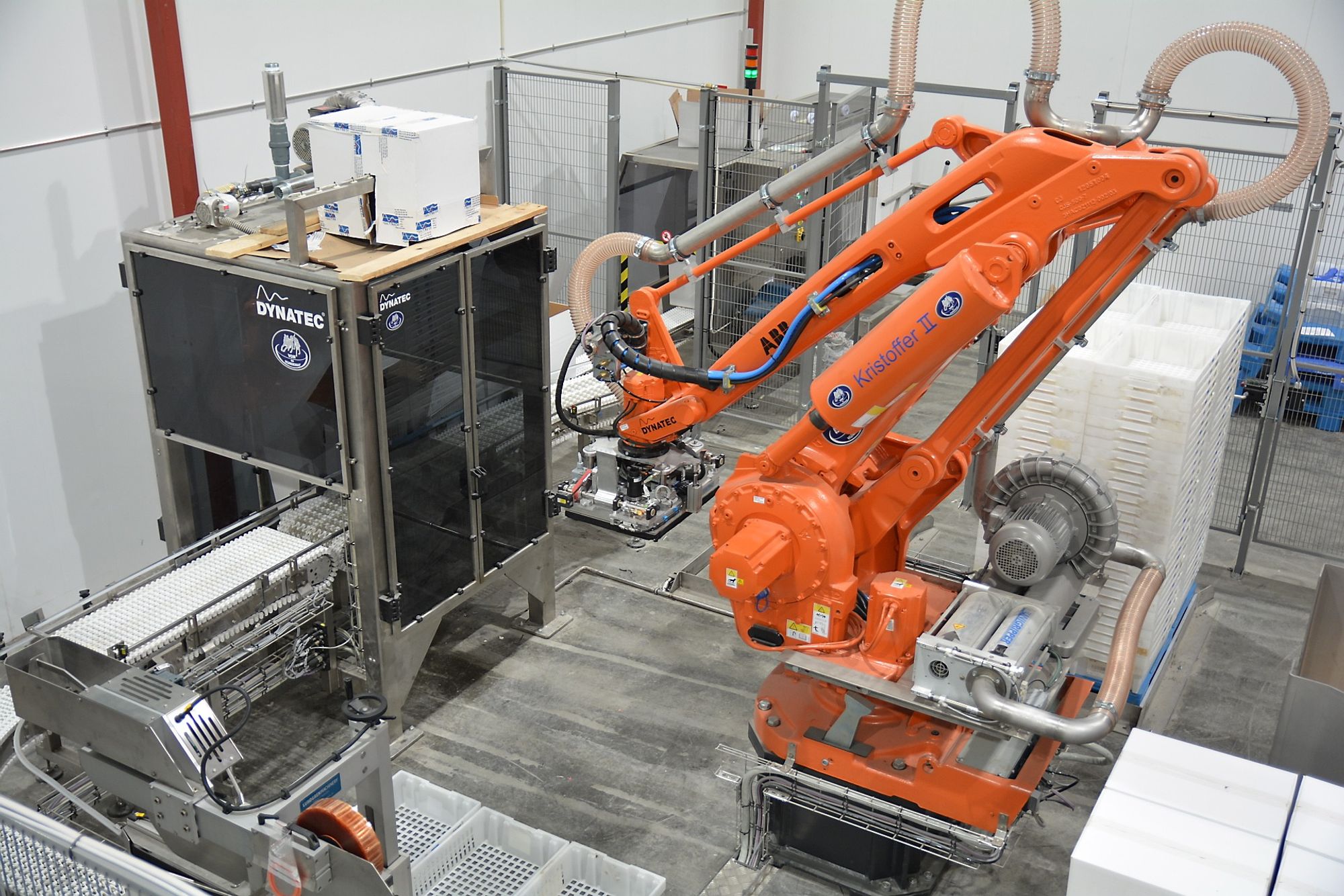
Operatørene har selvsagt fått en helt annen hverdag. Det er slutt på tunge og repeterende løft. Dynatec har utviklet et brukervennlig grensesnitt på touchskjermer.
- Operatørene ser hvordan eskene står på skjermen i 3D, sier Sjödin, og viser oss hvordan brukerne kan kjøre robotene til sikker posisjon eller autokjøre tilbake dersom noe uforutsett har skjedd.
- Vi har senket brukerterskelen, det er ikke nødvendig med utdanning i robotisering, mener han.
Sann styring
Dynatec har skrudd sammen den pc-baserte styringsløsningen på en plattform fra ABB. Vi får vite at den kjører på et sanntidsoperativsystem, ikke Windows, og at den er basert på et høynivåspråk. Systemet styrer også samspillet mellom robotene. Devicenet står for majoriteten av kommunikasjonen mellom utstyret.
Les også: Freia melkesjokolade lages med flunkende ny styring