

De store oljefeltenes tid er over. Nå er det oljepyttene og små gasslommer som skal utvikles.
– Vi vil gjøre de små feltene drivverdig. Da gjelder det å få ned utbyggings- og driftskostnadene, sier Ulrik Bindingsbø.
Han er prosjektleder for Framtidige Utbyggingsløsninger ved Hydros forskningssenter i Bergen.
Finansiert
Teknisk Ukeblad møter ham ved den nye laben til ni millioner kroner som Hydro har finansiert hos Sintef i Trondheim. Her tester forsker Pål Liljebäck roboten under de krevende forholdene på en plattform.
Roboter er i dag vanlig på fabrikker, men på plattformer må operatøren sitte milevis unna og detaljstyre roboten ved hjelp av lyd og video.
Pendel tilbake
Bindingsbø antyder at pendelen mot at «alt» skal bygges undersjøisk (subsea) har gått for langt.
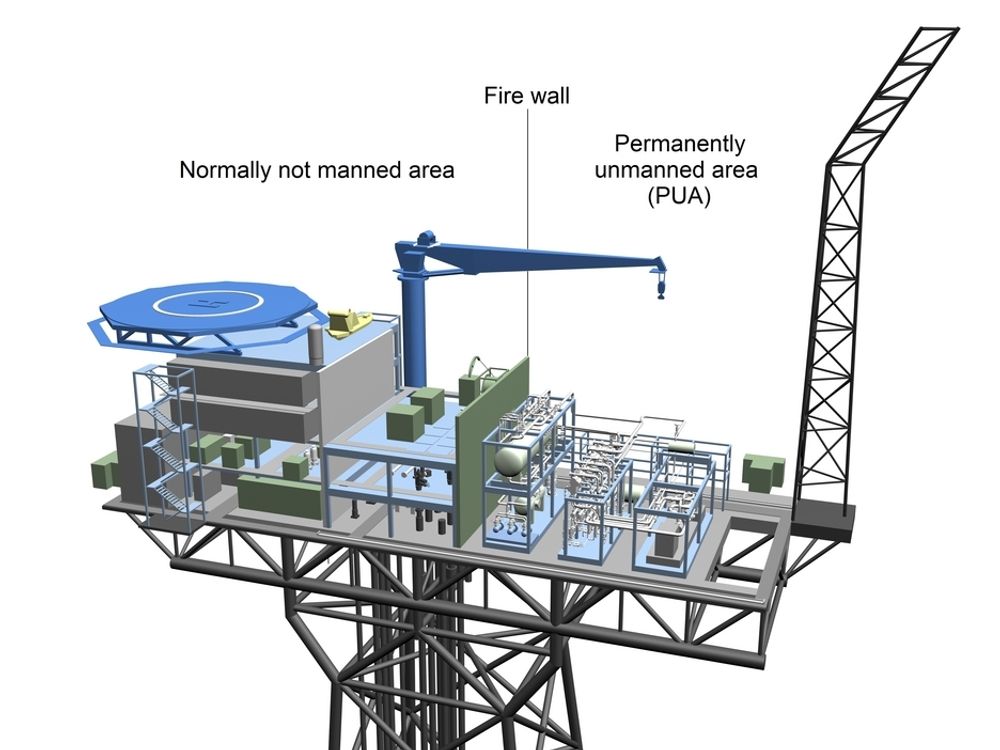
– På havdyp inntil 150-200 meter kan en ubemannet, robotisert plattform være et bedre alternativ. Man får vanligvis utnyttet 55 prosent av reservene på en oversjøisk plattform, mens subsea oppnår vanligvis 45 prosent. Dessuten er vedlikeholdet enklere, og utbyggingen og driften blir billigere, påpeker Bindingsbø overfor Teknisk Ukeblad.

Erstatter ikke folk
Selv om roboter teoretisk kunne erstattet en del personell ved eksisterende plattformer, understreker Bindingsbø at det ikke er planer om å erstatte bemannede plattformer med roboter.
– Offshoreindustrien har ikke vært drivere i automatisering. Profitten har rett og slett vært for høy. Når feltene er mindre og profitten marginal, blir dette mer aktuelt, sier han.
Den første robotiserte plattformen kan stå klar i 2015.





