
Flere og flere maskiner, fra robotgressklippere til brøytemaskinene på Gardermoen, styrer i økende grad seg selv. De utfører gjerne oppgaver som innebærer en helserisiko, for eksempel der det er mye støy, eller oppgaver som rett og slett er farlige eller bare kjedelige. Felles for de fleste autonome kjøretøy er at de opererer på lukkede områder, som byggeplasser, industriområder, havner og flyplasser.

– Skal selvkjørende biler en gang i fremtiden slippes løs i trafikken, må de vite nøyaktig hvor de er i sanntid, sier Petter Arnesen i Sintef.
Han er godt i gang med å kartlegge posisjoneringsbehovene for fremtidens transport og har begynt med å teste dagens tjenester.
Løpetur i elva?
Har du vært på løpetur med en treningsapp? Da vet du at ruta som appen registrerer, ikke er hundre prosent nøyaktig ned til centimeteren, og GPS-sporet kan typisk se slik ut:
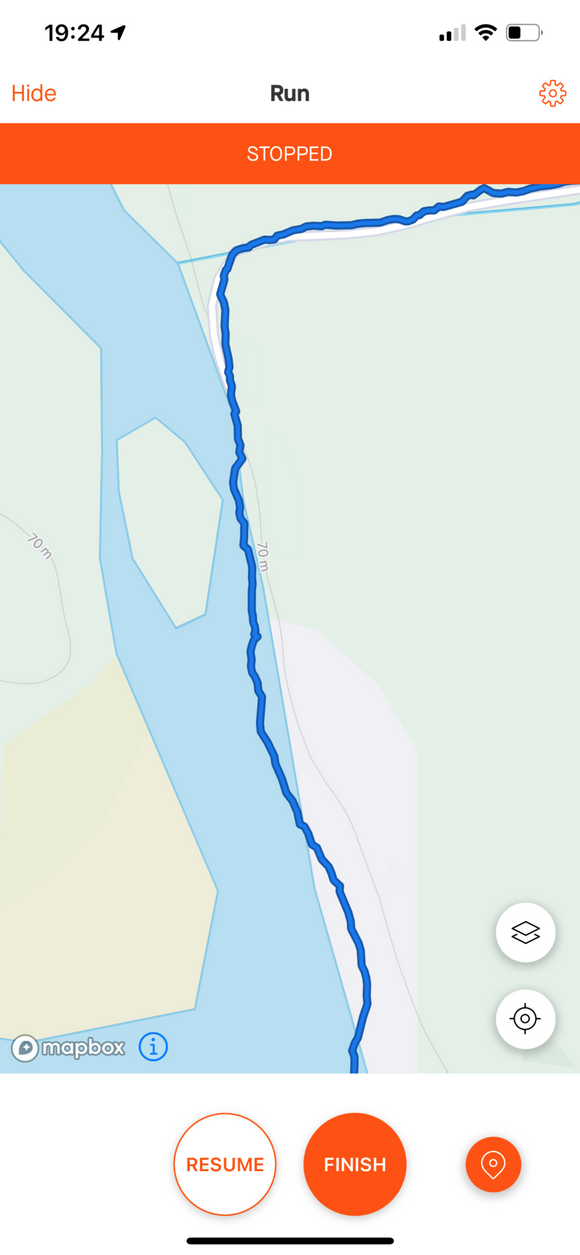
Her påstår appen at løperen var ute i elva på turen sin. Ikke så farlig i denne sammenhengen, men hvis det samme verktøyet skal hjelpe en bil med å holde seg i riktig kjørefelt og i tillegg kommunisere til andre hvor det er, er det åpenbart ikke bra nok.
Testet ulike tjenester på buss i Drammen
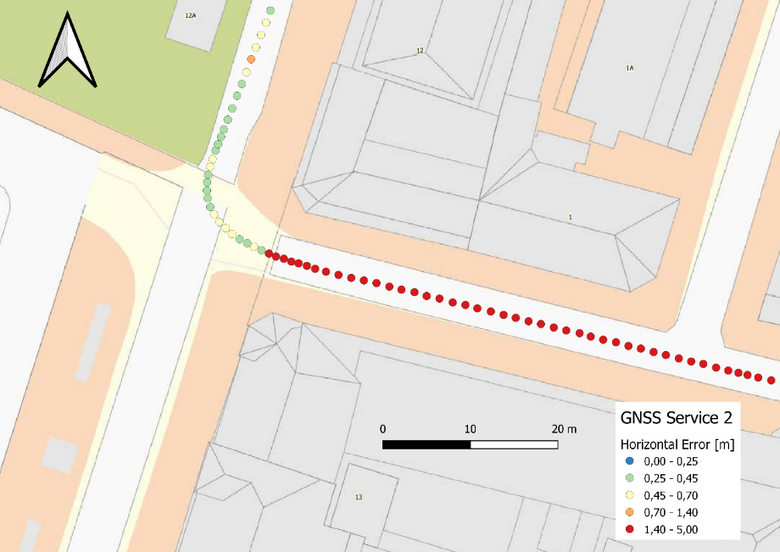
For å teste nøyaktigheten til dagens posisjoneringstjenester grundigere, utstyrte Kartverket, Applied Autonomy og Sintef en selvkjørende buss med ulike lokaliseringstjenester som er tilgjengelige på markedet. Så sammenlignet de resultatene med posisjoneringen til bussens eget navigasjonssystem.


– Denne testingen ga oss svært god innsikt i styrker og svakheter ved ulike satellittbaserte tjenester, deriblant GPS, i ulike omgivelser, sier forskeren.
Resultatene var tydelige: Ingen av systemene er nøyaktige nok til at det er forsvarlig å la bussen kjøre på egen hånd. Den beste tjenesten var mindre enn 20 cm unna fasiten bare 20 prosent av tiden.
Det kom ikke som noen stor overraskelse på forskerne. Det er nemlig godt kjent at man må kombinere flere teknologier for å få nøyaktig nok posisjonering.
– For det første må man ha det som kalles korreksjoner til GNSS, det vil si at posisjonen man får fra satellittene, som kan være unøyaktig, blir justert ved hjelp av kjente referansepunkter. I tillegg trenger man informasjon fra sensorer i bilen for å justere denne posisjonen inn mot lokale omgivelser, sier Arnesen.
Selvkjørende maskiner er derfor utstyrt med teknologi som kan «se» andre kjøretøy eller stripene i veibanen, som kamera, radar og i økende grad lidar (som bruker lys på tilsvarende måte som radar bruker radiobølger). Dette er blitt standardutstyr i de fleste nye biler.
– I bussen i Drammen testet vi kun satellittnavigasjon, men det er svært viktig å forstå styrkene og svakhetene til alle komponentene som går inngår i fremtidens navigasjonssystemer, sier Arnesen.
Derfor planlegger forskerne også testing av forskjellige sensorteknologier for å få oversikt over kritiske behov og forstå hvordan de ulike teknologiene kan fungere best mulig sammen.


Mange hindringer på veien
Satellittbasert posisjonering møter ulike utfordringer i ulike miljøer, og høye hus som skygger for signalene, er en av dem. Dette så man tydelig også i testen i Drammen.
Norske forhold kan være spesielt utfordrende.
Været, terrenget og de mange tunnelene, til og med atmosfæren, gjør at tjenestene som er i bruk i resten av Europa, ikke vil fungere like godt her. For eksempel virker ikke GNSS inne i tunneler, og nordlyset kan forstyrre satellittsignalene.
– Vi må derfor se på egne teknologier og løsninger for å sikre nøyaktig nok posisjonering i nordiske forhold, sier Arnesen.
Blant annet jobber telebransjen med egne posisjoneringsløsninger i sine telenettverk.
Tjenestene må kunne brukes av mange
– Etter hvert som vi kartla behovene, ble det helt tydelig at tjenestene som er tilgjengelige i dag, ikke alene vil fungere for transportsektoren i fremtiden, sier Arnesen.
Selv de mest presise løsningene på markedet, som blant annet brukes i oppmåling ved veibygging, tilfredsstiller ikke uten videre kravene fra fremtidens transportsektor (se CPOS faktaboks under). Løsningene er blant annet ikke skalerbare slik at de kan brukes i alle kjøretøy.
– Derfor skal vi jobbe videre med dette, blant annet sammen med Kartverket, for å se på hvordan vi kan forbedre og skalere dagens tjenester så de kan bli tilgjengelige for massemarkedet, sier Arnesen.
Om det lykkes, vil det gi grunnlag for bedre førerstøttesystemer og en mer effektiv og trafikksikker veitransport.
Artikkelen ble først publisert på Gemini.no

Drammen fikk sin første selvkjørende buss: – Ikke fullt så følsom som de første versjonene





