TRONDHEIM: Den ubemannete overflatefarkosten Otter ligger fortøyd til flåten i bukta rett nedenfor lokalene til Maritime Robotics i Trondheim. På brygga ligger en temmelig ordinær ROV med et stykke ny, norsk høyteknologi, et posisjoneringssystem til bruk under vann, basert på lyd.
Norske robotikk- og automasjonseksperter forener krefter for å utvikle morgendagens oppdrettsanlegg. I et Sintef-ledet prosjekt, Artiflex, utvikles teknologien.
Mye av det finnes allerede, men systemer må kobles sammen, kommunisere og interagere.

Robusthet i elektronikk og mekanikk må bygges inn når utstyret skal klare seg i mange dager, ja kanskje uker, uten tilsyn.
Volum-produkt
Administrerende direktør Vegard Evjen Hovstein ser på Otteren.
– Den skal bli vårt volumprodukt. Vi har ikke full oversikt over alle mulige bruksområder ennå, men får stadig nye ideer og innspill, sier Hovstein til TU.
Otteren er en toskrogs farkost, det vil si katamaran, som måler 1,8 meter i lengde, 91 centimeter i bredden og veier 60 kilo. Fire batteripakker, som skal holde til 15 timers drift og lett kan byttes, driver to thrustere for framdrift og manøvrering. Den kan utstyres med ulike typer sensorer og utstyr. Nå er det et multistråleekkolodd om bord.
.jpg)
– Vi demonstrere nå hvordan den kartlegger havbunnen. Den velger selv hvordan det skal gjøres. Det er ikke noe ferdig programmert mønster. Den jobber autonomt til den er ferdig og dekker hele området, litt som en robotgressklipper, sier Hovstein.
Ubemannet plattform
.jpg)
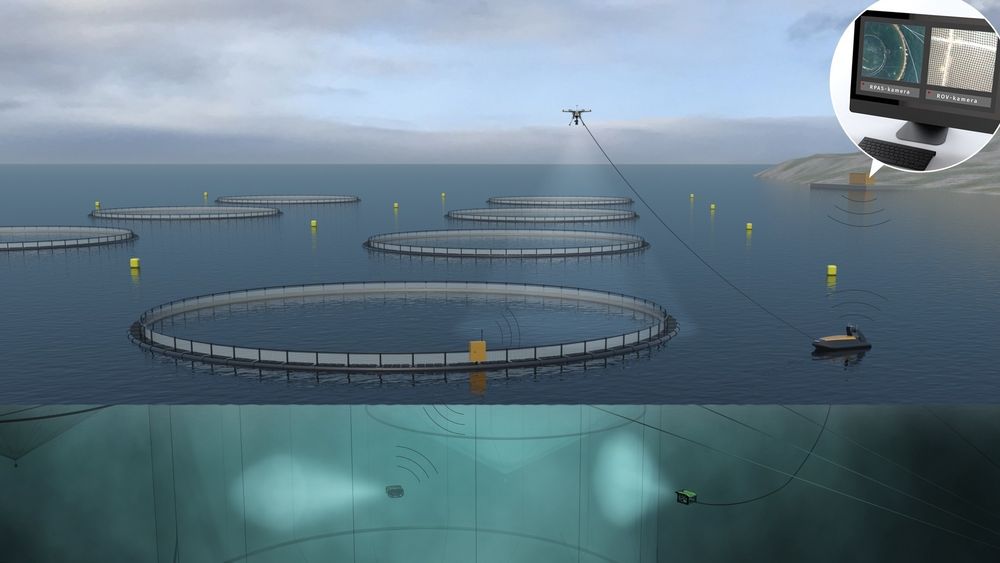
I prosjektet Artifex ser de på en versjon av Otteren som en plattform. Tanken er at den skal fungere som en base for utsetting og innhenting av ROV og mulig annet utstyr, deriblant flydrone, som skal utføre inspeksjon og annet arbeid på merdene.
Sintef Ocean leder prosjektet Artifex med et budsjett på 18 millioner kroner. Det startet opp for ett år siden og skal pågå i enda ett.
Sintef Ocean-forsker Per Rundtop leder Artifex-prosjektet.
– Målet er å kunne drive oppdrettsanlegg uten mennesker til stede. Det vil bety tryggere arbeidsforhold og gi mulighet for å plassere anlegg i tøffere værområder, sier Rundtop.
For å komme til målet, trengs «muliggjørende teknologi».
– Vi har en lang liste, fra sensorer, navigasjon, kommunikasjon, robusthet, funksjonalitet, kunstig intelligens og autonomi. Mye er på plass, men det må kommunisere og samhandle med annet utstyr, sier forskeren.
– Vi har satt oss hårete mål. Vi skal kunne operere med autonome farkoster i opp til 2,5 meter signifikant bølgehøyde, sier han.


Helt autonomt blir det ikke i utgangspunktet. I Artifex-prosjektet er målet å bruke tilgjengelig teknologi for ubemannete operasjoner, styrt fra land.
- Bedre DAB-lyd: Norskutviklet antenne kan bli redningen
Ubemannet – ikke autonomt ennå
– Det er mye snakk om automatisering, men vi er i realiteten et godt stykke derfra, sier Rundtop.
Norsk forening for automatisering (NFAS) har definert veien mot full automatisering som en 10-trinnsprosess. Foreløpig er det ikke mange som er kommet til trinn 5 en gang.
Vegard Evjen Hovstein bruker for enkelhets skyld å beskrive prosessen som tre-delt – fjernstyrt, automatisert og delvis selvgående og til slutt fullt ut autonom der objektet selv tar beslutninger om riktig operasjoner.

- Her er Norge verdensledende: Nå skal vi gjøre det til en milliardindustri
LARS i 2,5 meters bølger
I løpet av høsten skal Maritime Robotics bygge en prototyp på USV til Artiflex.
– Det er litt tidlig å si størrelsen og hvordan den vil se ut, men vi jobber med spesifikasjonene, sier Hovstein.

Rundtop opplyser at noe av det mest kompliserte er å lage system for å sette ut og ta opp ROV og drone. Et slikt «launch and recovery system - LARS» må forholde seg til to objekter som begge er i bevegelse i flere retninger.
ROV-operasjon
I dag opereres ROV-er manuelt fra en base om bord på et skip, eventuelt fra land eller oppdrettsflåte.
– Det er veldig vanskelig å styre ROV-er. De kan selv holde høyde og retning, men vet ikke nøyaktig hvor i vannet det, det vil si posisjonering. Med en ny teknologi for undervannskommunikasjon er det mulig, sier Hovstein.
En ROV med «autohold» av posisjon, er et skritt mot autonome ROV-er. Et lite norsk selskap, Water Linked, har kommersialisert teknologien som gjør autohold og posisjonering mulig.
.jpg)
Administrerende direktør Oliver Skisland i Water Linked forklarer i runde ordelag hvordan de har løst utfordringene som store selskaper, deriblant Kongsberg, sliter med.
– Det er ikke så mye snakk om ny teknologi som en ny måte å utnytte frekvenser på under vann. Det ligger i software og mye beregninger, sier Skisland.
Triangulering og regning
Detaljert forklaring på hvordan de har løst gåten, vil han ikke gå inn på av konkurransehensyn, men sier at det ikke ville vært mulig for fem år siden.
– Det skal enormt mye regnekraft til. Det har vi nå i denne kofferten, sier han og peker på en svart boks med fire ledninger ut av.
På flåten nedenfor Maritime Robotics står en ROV klar til å settes i vannet. Den har påmontert en liten senderenhet. Den kommuniserer under vann til fire antenner som stikker ned i vannet med et visst mellomrom.
Det fungerer som triangulering av mobilantenner som kan plassere din mobiltelefon. Med fire antenner blir presisjonen bedre, og vi kan ha opptil syv antenner.
Med mulighet for posisjonering, vil ikke ROV-en drives vekk av strøm eller «røskes vekk» og ut av posisjon.
- Vil hente hjem industriproduksjon: 22 bedrifter planlegger felles robotfabrikk
Maskinsyn
I Artiflex-prosjektet vil de utvikle ROV-er som ved hjelp av maskinsyn skal inspiserer nøter og kunne kjenne igjen hull.
I neste fase vil de også utvikle verktøy slik at ROV-en kan reparere hullet – uten at noen mennesker nødvendigvis vet om det en gang. Uten posisjoneringsevne og «autohold» vil ikke det være mulig.
ROV-produsenten Argus Remote Systems i Bergen er også med på prosjektet.
Daglig leder Frode Korneliussen sier at ROV-er og systemer må gjøres mer solide når de skal fjernstyres og operer langt vekk fra land og i mer utsatte områder.
– Utstyret må være av svært høy kvalitet og mer robust, både mekanikk og elektronikk, sier Korneliussen.
Kommersialisert
Lydsignaler gjennom vann er veldig vanskelig. Lydbølgene blir forvrengt, stanses og andre lyder blander seg inn. Water Linked har klart å løse store deler av dette og mener de er først i verden. De har allerede solgt «store mengder» enkle, lett kommersialiserbare løsninger til utenlandske kunder.
– Vi hadde valget om å jobbe mot færre, proffe aktører eller flere ROV-leverandører med mindre enheter vendt mot et større marked. Det var de som viste interesse først, sier Skisland.
Selskapet har i løpet av noen måneder solgt i underkant av 100.
– Det er deilig, etter å ha jobbet i laboratoriet i fire år. Nå er vi ute og ser at det er behov for produktet vårt, sier Skisland.
Interesse
Under Aqua Nor i Trondheim forrige uke, fikk Water Linked en klar bekreftelse. Flere møter ble holdt med potensielle ROV-leverandører.
FoU-direktør i SHM, Rene Volden, er imponert over Water Linked.
– Innen fiskeri og havbruk er IoT, «internt of things», det neste store. Produkter som sikrer kommunikasjon under vann vil være svært nyttig, sier Volden til TU.
Amazonas-tur
Vegard Evjen Hovstein forteller hvordan selskapet utvikle Otteren. Fra før har selskapet utviklet en 5,6 meter lang, 2 meter bred USV på 1,7 tonn med dieselmotor. Et oljeselskap som operer en rørledning i Amazonas kontaktet Maritime Robotics og spurte om å få leie Mariner til å inspisere ledningen.
– Det fristet ikke med alt som kreves av papirarbeid, sending med skip, fortolling, pakking, og mye styr. Dessuten ville Mariner være utilgjengelig for oss i minst et halvt år. Og inspeksjonsjobben ville ta bare to-tre dager. Da satte vi i gang med å lage Otter på 60 kilo og demonteres og sendes med fly, sier Hovstein.





