
Kongsfjorden, Svalbard, mai 2022: Det er vår, solen skinner og noe er i ferd med å skje ute i det kalde, arktiske havvannet.
Lange lyse dager og økende temperaturer har vekket planteplanktonet til live. Våroppblomstringen har startet, det gror under overflaten.
Fra en båt ute på fjorden lemper Tore Mo-Bjørkelund en robot ut i sjøen. Så en til. Det er to lette AUV-er, selvkjørende undervannsroboter.
De er programmert til å bevege seg rundt i vannet og fange opp det fluorescerende lyset fra klorofyll. Det grønne pigmentet som planteplanktonet bruker til fotosyntesen.
– Våren er en hektisk tid ute i havet, og algeoppblomstringer er en dynamisk og uoversiktlig prosess. De er vanskelige å kartlegge i detalj, sier Mo-Bjørkelund når Gemini ber ham fortelle om arbeidet de gjorde på Svalbard.
Vannprøver

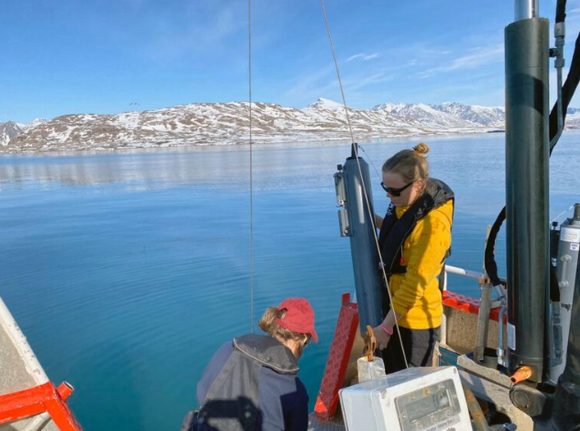
Han har brukt doktorgradstiden sin ved NTNU til å utvikle algoritmene som skal fange oppblomstringen i tid og rom. Med seg ut på sjøen har han marinbiolog Sanna Majaneva, som er klar til å ta vannprøver når undervannsrobotene har funnet frem til de tetteste algekonsentrasjonene.
Mens Mo-Bjørkelund vil teste ut ny, kostbar og avansert robotteknologi, er Majaneva utstyrt med en Niskin vannhenter. Et plastrør festet til en wire, med en enkel mekanisk utløser.
Når røret er kommet ned på rett dyp, sendes et lodd ned wiren. Loddet treffer en utløser og røret lukkes.
Løsningen er svært lik den Fridtjof Nansen utviklet for over hundre år siden for å fange vannprøver på akkurat det dypet man ønsker seg.


Økt snøfall kan redde truede isbreer i Sør-Amerika
Gamle, men robuste metoder
De to robotene som akkurat nå beveger seg ute i sjøen kan virke teknologisk overlegne, men det er Sanna Majanevas enkle vannhenter som vil gi fasiten.
– De tingene der, de fungerer. Det som er med teknologiutvikling, er at våre ting som regel ikke fungerer, sier Mo-Bjørkelund.
– Et plankton-nett eller en vannhenter derimot, det fungerer nesten uansett. Det er enkle, billige og robuste løsninger som moderne teknologi sliter med å matche.
Men biologene trenger nye løsninger for å få et bedre bilde av hva som skjer under den gråblå, ugjennomsiktige vannflaten.
En vannhenter kan ta prøver langs en loddrett linje i vannet og gi et bilde av hva som skjer akkurat der. Men det sier lite om hvordan algeoppblomstringen opptrer i rommet rundt den loddrette linjen.


Derfor trenger Majaneva hjelp fra Mo-Bjørkelunds undervannsrobot. Roboten kan noe vannhenteren ikke kan: Den kan lete seg fram til hvor de tetteste konsentrasjonene av planteplankton befinner seg.

Derfor gjør julelukter oss så glade
Sjekke ujevn fordeling av plankton
Majaneva forklarer:
– Vi tenker oss kanskje at det er en homogen distribusjon av plankton i vannet. Men vi vet at det er en slags fin-skala «patchiness», en slags flekkvis fordeling. Dette er vanskelig å studere med tradisjonelle metoder, og det kan være mer som skjer mellom ulike organismer inne i disse flekkene enn det vi vet om.
Hun er en av flere marinbiologer fra NTNU som har deltatt på prosjektet «Arven etter Nansen», der tverrfaglig forskning skal gi ny kunnskap om det marine klimaet og økosystemer i rask endring.

De årlige våroppblomstringene av planteplankton utgjør selve fundamentet i de marine økosystemene, og fortsatt er det mye man ikke vet.
– Jeg forsker på dyreplankton. Jeg vil vite hva som skiller dem fra hverandre, hvordan de lever sammen og påvirker hverandre i det pelagiske miljøet, sier Majaneva.
Studier av hva som skjer under en oppblomstring av planteplankton er viktig for å kunne få bedre innsikt i hva som skjer hos organismene et trinn lenger opp i næringskjeden.
– Vi vil gjerne vite mer om biodiversitet og forekomst av forskjellige planktonarter. Kanskje spiller denne fin-skala «patchiness» en viktigere rolle enn det vi har trodd til nå, sier Majaneva.

Ble historisk: – Vi er nødt til å være med
Robotene trenes i å ta avgjørelser underveis
De to undervannsrobotene skal nå bevege seg rundt omkring og måle fluorescens i et område på 1,5 km ganger 1,5 km, ned til 50 meters dyp. I denne tredimensjonale boksen av vann skal de finne ut hvor konsentrasjonen av klorofyll er høyest.
De skal også beregne hvor målingene er mest usikre, for å kunne måle på nytt igjen og øke kvaliteten på dataene. Samtidig skal de unngå å krasje borti hverandre.
– Temaet for doktorgraden min har vært det som heter adaptiv måling. Man bruker målinger underveis, til å avgjøre hvor man skal måle neste gang, forteller Mo-Bjørkelund.
– Jeg vil ikke kalle det kunstig intelligens. Det er ikke noe nevralnett i sving. Men vi trener en modell på data vi henter inn i felt. Roboten tar avgjørelser basert på data samlet inn underveis. Modellen er en matematisk-statistisk prosess, en romlig optimal interpolering som roboten bruker til å ta avgjørelser med.
I forkant av feltarbeidet har han finpusset programvaren ved å kjøre simuleringer av det forskerne regner med vil skje i felt. Nå skal han få svar på om systemet virker.

Får 3D-bilde av fotosyntesen i sanntid
Etter en første kartleggingsrunde kommer de to robotene opp til overflaten for å utveksle data via satellitt. Slik kan den ene roboten ta avgjørelser basert på data fra den andre. Enten det er for å utforske områder med usikre målinger på nytt igjen, eller for å unngå å kollidere med den andre roboten.
Om bord i forskningsskipet kan forskerne følge med på måledataene som kommer inn i et tredimensjonalt bilde på skjermen. Slik får de et bilde av fotosyntesen i vannet, akkurat der og da.
– I dette tilfellet så vi at det var lite klorofyll i overflaten, men en stor oppblomstring lenger ned, sier Mo-Bjørkelund.
Mens han har gjort mesteparten av sin jobb på kontoret i forkant av Svalbard-toktet, er det nå jobben starter for Majaneva.
Finsk sandbatteri skal produsere strøm – trenger turbin og generator
Vannhenterens tur
Etter en andre runde med målinger plukkes robotene opp av vannet. Forskerne kjører ut til stedet der robotene har målt de tetteste konsentrasjonene, og hiver vannhenteren uti.
Hvilke arter befinner seg i vannet? Hvordan går energiflyten mellom planteplanktonet og dyreplanktonet?
For Mo-Bjørkelund markerer dette slutten på måneder og år med arbeid.
– Dette var en test. Skal slike roboter settes inn som en standard metode, kreves det mye mer ingeniørarbeid. Biologene bruker teknologi som er utviklet for mange tiår siden, men det er fordi moderne teknologi ikke er robust nok ennå.
Ønsker kostnadseffektiv forskning

Trondheim, høsten 2024: Det har gått to år siden toktet på Svalbard. Mo-Bjørkelund har for lengst gjort ferdig sitt engasjement ved NTNU og har etablert sitt eget firma for undervannsteknologi sammen med tre andre tidligere NTNU-studenter.
Gemini treffer Sanna Majaneva over en rask kaffe mellom travle økter på laboratoriet på NTNU Vitenskapsmuseet i Trondheim.
Hun har brukt genetiske metoder til å finne ut hvilke planter og dyr som befant seg i vannprøvene fra Kongsfjorden. Men å identifisere hvilke organismer som befinner seg i vannet er ikke enkelt, selv om man finner DNAet deres i vannprøvene.
– Vi bruker miljø-DNA og genetisk strekkoding for å bestemme planteplankton, dyreplankton og fisk. Miljø-DNA er en effektiv metode for å kartlegge biologisk mangfold, men vi har fortsatt mange arter som ikke finnes i DNA-referansebibliotekene.
Dessuten, om forskerne finner DNA fra en bestemt art i et område, kan de ikke vite med sikkerhet at dyret levde akkurat der de fant det.
– Det kan også ha kommet dalende ned som et fragment fra lenger oppe i vannsøylen, sier Majaneva.

Teknologien lar deg oppleve arkitektur som ikke finnes
Pengepress – også i miljøovervåking
Hun forteller om et stadig press for å gjøre miljøovervåking og biologisk forskning mest mulig kostnadseffektiv.

De genetiske metodene gjør at hun slipper månedsvis med mikroskoparbeid, men metodene trenger fortsatt utvikling og etterlater mange ubesvarte spørsmål.
Mo-Bjørkelunds undervannsroboter kan på sin side spare biologene for kostbar tid i felten.
– For oss vil slike roboter bety at vi kan undersøke flere steder, på ulike dyp, studere effekten av ulike strømretninger. De hjelper oss med å bestemme hvor prøvene skal tas, eller hvor vi bør ha stasjoner.
– Skal vi ta vannprøver på 20 eller 35 meter? Vi kan jo ikke hente opp hele vannsøylen. Kanskje roboten kan ta vannprøver for oss? Da trenger vi ikke engang å være til stede. Tokt er kostbart, sier Majaneva.
«Arven etter Nansen» ferdig – veien videre
Mens prosjektet Arven etter Nansen nå er avsluttet, fortsetter arbeidet med utvikling av selvstyring for undervannsroboter ved NTNU.
– Havet endrer seg kontinuerlig, og vi vil aldri kunne måle alt hele tiden. For å forstå havet best mulig, må vi konsentrere innsatsen i de mest interessante områdene sier professor Martin Ludvigsen ved Institutt for marin teknikk, NTNU.
I prosjektet Harvest tester man nå hvordan undervannsrobotene kan bruke ekkolodd og partikkelkamera til å beregne konsentrasjonen av dyreplankton i vannet, mens prosjektet Mascot konsentrerer seg om de statistiske metodene som lar roboten avgjøre hvor og når målingene skal gjøres.
– Adaptiv kartlegging ved hjelp av selvstyrte undervannsfarkoster kan gi oss mye bedre innsikt i dynamikken både i fysiske, biologiske og kjemiske prosesser i havet, sier Ludvigsen.
Majaneva mener Arven etter Nansen-prosjektet har vist hvor viktig tverrfaglighet er.
– Vi trenger hverandres kunnskap for å få det store bildet, sier marinbiologen.
Artikkelen ble først publisert på Gemini.




